Mobilna robotika
Mobilna robotika. Robot je tehnički uređaj određene autonomnosti, sa svrhom obavljanja nekih kretanja i funkcija koje obavlja čovjek. (Z. Kovačić, S. Bogdan i V. Krajči: Osnove robotike , Graphis, 2002.). Stacionarni (industrijski) roboti.

Mobilna robotika
E N D
Presentation Transcript
Mobilna robotika Robot je tehnički uređaj određene autonomnosti, sa svrhom obavljanja nekih kretanja i funkcija koje obavlja čovjek. (Z. Kovačić, S. Bogdan i V. Krajči: Osnove robotike, Graphis, 2002.)
Stacionarni (industrijski) roboti • - bar jedna točka im je fiksirana prema okolini (utječe na napajanje, komunikaciju, …)- okolina je relativno poznata- na određene objekte u okolini djeluju(utječe na najčešće vrste senzora)
Mobilni roboti • roboti koji imaju sposobnost kretanja u prostoru • imaju i sustave za pokretanje, prepoznavanje okoline i sustave za određivanje relativnog položaja u prostoru.
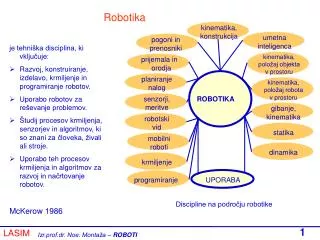
Suvremeni roboti • Strukturna podjela suvremenih robota: • Po okolini u kojoj rade • Po načinu lokomocije • Po namjeni • Po vrsti terena
Podjela robota po namjeni • Roboti opće namjene • Roboti za rad u tvornicama • Roboti za rad u opasnim, nejasnim, prljavim ili nedostupnim područjima • Vojni roboti • Školski – edukacijski roboti • Roboti za uporabu u zdravstvenim institucijama 6 7 8
6 8
7 8
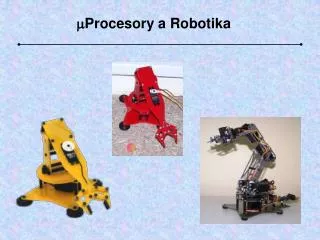
Mobilni robot • On je mobilan, manipulativan fizički sustav koji se autonomno giba kroz nestrukturirani prostor ostvarujući pritom interakciju s ljudskim bićima ili autonomno obavljajući neki posao umjesto njih. Mobilni robot nema dio fiksiran u okolini te ima vlastito napajanje. • Mobilni robot predstavlja jedan funkcionalni sustav. Taj sustav se sastoji iz niza podsustava: • mehanički, • pogonski, • energetski, • upravljački, • senzorski, • komunikacijski ...
Ultrazvučni senzor – sonar za određivanje udaljenosti • Infracrveni senzor za određivanje udaljenosti • Infracrveni senzor za karakterizaciju plohe
Lokomocija • Konkretno kod ovoga robota koristimo diferencijalni pogon, istosmjerne motore za pokretanje kotača koji koriste 2 jednostavna fizikalna zakona za gibanje u prostoru.
Senzori • Imamo dvije vrste senzora: • Unutarnji senzori • Vanjski senzori
Ultrazvučni senzor • Parallax PING je ultrazvučni senzor koji nam omogućuje vrlo jednostavno i precizno mjerenje udaljenosti, sastoji se od dva ultrasonična senzora koji odašilju signal određene frekvencije u okolinu te doseg senzora je 3 m.
Infracrveni (IR) senzor • Parallax i Sharp IC IR senzor sastoji se od IR LED diode i IC tranzistora. Temeljni princip rada senzora bazira se na reflektiranju IR zraka u IC tranzistor. Ovakav senzor može se koristiti za detekciju objekata ili prepoznavanje crne i bijele boje.
Programiranje • Programiranje se vrši serijskom komunikacijom preko sučelja roboJDE u programskom jeziku Java, objektno orijentirana arhitektura.
Demonstracija programa • translacija (naprijed) • rotacija • kombinacija translacije i rotacije • kvadrat • osmica • izbjegavanje prepreka
Problemi s robotom • Nepreciznost motora • Problemi s istosmjernim motorima • Nepreciznost senzora • Gutanje BATERIJA (Želimo punjive :D) !!! • Nemogućnost uporabe reaktivnog ponašanja • Programska regulacija motora je presložena