Download
1 / 10
120 likes | 613 Views
ROBOTIKA I AUTOMATIZACIJA. IX semestar (3+1+1) Predavawa: dr Petar Mari}, docent Vje`be: dipl. in`. Jasmin Igi}, asistent. Literatura. V.Potkowak, ROBOTIKA , Nau~na kwiga, Beograd, 1989. M.Vukobratovi}, N.Kir}anski, … UVOD U ROBOTIKU Institut M.Pupin, Beograd,1986.

E N D
ROBOTIKA I AUTOMATIZACIJA IX semestar (3+1+1) Predavawa: dr Petar Mari}, docent Vje`be: dipl. in`. Jasmin Igi}, asistent
Literatura • V.Potkowak, ROBOTIKA, Nau~na kwiga, Beograd, 1989. • M.Vukobratovi}, N.Kir}anski, …UVOD U ROBOTIKU Institut M.Pupin, Beograd,1986. • L.Sciacicco, B.Siciliano, Modeling and Control of Robot Manipulators, Mc Graw-Hill Book,Co, Singapore, 1996. • K.S.Fu, R,C. R.S.Gonzalez, C.S.Lee, ROBOTICS, control, sensing, vision and inteligence, Mc Graw-Hill Book,Co, Singapore, 1987. • R.J. Schilling, Fundamentals of Robotics Analysis and Control, Prentice Hall, New Jersey, 1990. • R.P. Paul, ROBOT MANIPULATORS, mathematics, programming and control, MIT Press, Massachusetts and London, 1984
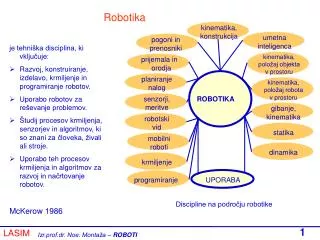
Upravqawe i modelovawe dinami~kim objektima Ra~unarska tehnika Metode vje{ta~ke inteligencije Senzori i pretvara~i Tehni~ka mehanika Teorija ma{ina Grane nauke i tehnike od interesa za robotiku
Karel ^apek Nau~no-fantasti~na drama (Rosumovi univerzalni roboti) (oko 1920.,^e{ka rije~i "robota" zna~i prisilni rad ) Mehani~ki qude koji su mehani~ki savr{eni i posjeduju izuzetno veliku inteligenciju Automatiu modernimproizvodnim linijama (30-tih god. pro{log vijeka) Numeri~ki upravqane ma{ine (upravqawerealizovano digitalnim ra~unarima) Kopiraju}i manipulatori (uvedeni za rad sa radioaktivnim materijama). 1. UVOD1.1. POJAM ROBOTA
Definicija pojma robota Tehni~ki ure|aj koji mo`e da izvr{ava neka kretawa i funkcije koje su karakteristi~ne za ~ovjeka i koji se odlikuje odre|enom samostalno{}u u radu. "Robot je automatizovan ure|aj koji obavqa funkcije koje se obi~no pripisuju ~ovjeku".(Webster) "Industrijski robot je vi{efunkcionalni manipulator koji se mo`e reprogramirati i koji je namjewen da pomjera radni materijal, predmete, ali i specijalne ure|aje na razne zadate na~ine u ciqu izvr{avawa razli~itih zadataka".RIA (Robotic Industries Association)
1.2. OBLASTI NAUKE I TEHNIKE KOJE ZAHTIJEVAJU UVO\EWE I RAZVOJ URE\AJA ROBOTSKOG TIPA • Nuklearna tehnologija • Podvodna istra`ivawa • Svemirska istra`ivawa • Industrijska proizvodwa • Medicina • Transport po nepravilnom terenu • ....
1.3. PROBLEM VJE[TA^KOG HODA Podloganije ravna ni homogena Prepreke na podlozi • Stabilnost (stati~ka, dinami~ka) • Broj nogu (dvije, ~etiri, {est i osam nogu) Dvono`ne hodaju}e ma{ine (bipedi) jednooslona~ka faza dvooslona~ka faza ? re`im tr~awa ? prepreke
2 Kod {estono`nih i osmono`nih ma{ina se stabilnost ostvaruje znatno jednostavnije od bipeda Skica hoda {estono`ne ma{ine sa pomjerawem tri noge istovremeno.
1.4. INDUSTRIJSKA ROBOTIKA Industrijski robot je opremqen mehani~kom rukom (manipulatorom) i upravqa~kim sistemom • Generacije industrijskih robota • Manipulatori sa ~vrstim programom (automati) - nulta (dorobotska) generacija • Roboti prve generacije (programski roboti) (playback - ponavqaju}i roboti) • Roboti druge generacije (adaptivni roboti) • Roboti tre}e generacije (inteligentni roboti)
1.4. FLEKSIBILNI PROIZVODNI SISTEMI • Fiksna automatizacija • Fleksibilna automatizacija • fleksibilna proizvodna }elija • fleksibilna proizvodna linija • fleksibilni proizvodni sistem • ra~unarski podr`ana proizvodwa(computer-aided manufacturing- CAM). • projektovawe pomo}u ra~unara(computer aided design- CAD). Proizvodwa ta~no na vrijeme(just in time manufacturing -JIT).