Cable Work Creating custom cables USB Programming cable: Direct USB connection to autopilot
20 likes | 215 Views
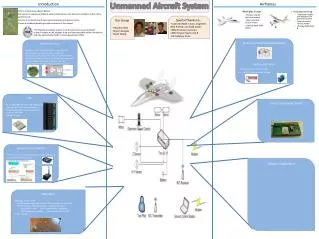
Introduction. Unmanned Aircraft System. Airframes. UAV is an U nmanned A erial V ehicle Our goal is to setup two different plane configurations with Paparazzi autopilot and fly them autonomously Do this in conjunction with two separate Aerospace Engineer teams

Cable Work Creating custom cables USB Programming cable: Direct USB connection to autopilot
E N D
Presentation Transcript
Introduction Unmanned Aircraft System Airframes • UAV is an Unmanned Aerial Vehicle • Our goal is to setup two different plane configurations with Paparazzi autopilot and fly them autonomously • Do this in conjunction with two separate Aerospace Engineer teams • Create a handbook detailing simple recreation of this project • Multiplex Funjet • Elevons only for pitch/roll control • Rear-mounted electric motor • Used by both AEM teams • Multiplex Minimag • Traditional rudder and elevators for pitch/roll control • Front-mounted electric motor • Used by AEM Team B • Our Group • Shuohan Wan • Dustin Douglas • Kevin Oberg • Special Thanks to… • Lockheed Martin Corp. engineers Reid Plumbo and Todd Colton • AEM Professor Hammer • AEM Project Teams A & B • EE Professor Ernie • The Paparazzi autopilot project is the premier open-source autopilot • Using it enables a UAS package to be sold internationally without limitations from the International Traffic in Arms Regulations (ITAR) • Motor and Electronic Speed Control • Battery and Servos • Infrared Sensors • We used a dual-axis sensor (seen in picture) for detecting pitch and roll on the x and y axes respectively and a single-axis sensor for the altitude • Sensors each had to have a set of resistors replaced in order to obtain the proper amplifier gain that corresponds to the signal the autopilot anticipates -2100mAh 11.1V Li-Poly battery -6.1 – 18 VDC autopilot input voltage -Hitec HS-55 servos • GPS • Th e U-Blox GPS receiver and antenna are • built into the Tiny autopilot board • Measures absolute sea level elevation • instead of altitude • Updates at 4 Hz • Tiny v2.11 Autopilot Board • Ground Control Station • The GCS controls the aircraft while in flight and can be overridden by manual control • Software Configuration • Cable Work • Creating custom cables • USB Programming cable: Direct USB connection to autopilot • Cables utilizing FTDI cables (USB – Serial converters) • Bootloader cable: Serial connection to autopilot • GPS Programming cable: Serial connection to GPS • Power cabling