
Joints: Classification and Structure for Better Health
E N D
Presentation Transcript
JOINTS Presentation by Lalit M. Tiwari
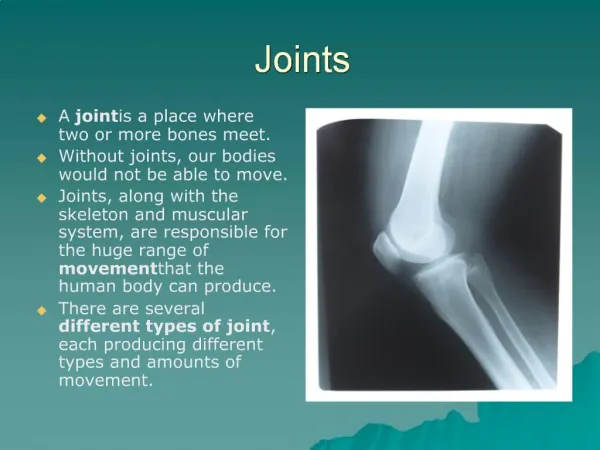
INTRODUCTION • In general, joint means a place where two things are joined together. • In anatomical usage a joint is a junction between two or more bones or cartilage. • The term articulation means a joint in Latin. • Term arthrology means study of joints. • Term arthritis means inflammation of a joint. • Basically a joint is a device to permit movements, however some joints are immovable.
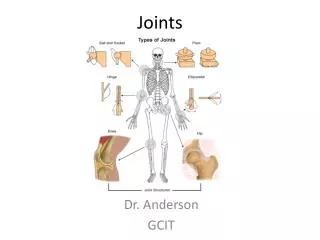
Classification of Joints • Classified according to: a) Functional Classification b) Structural Classification
Functional Classification • Based on the degree of mobility of joint. • They are of three types: a)Immovable joints (Synarthroses) b) Slightly movable joints (Amphiarthroses) c) Freely movable joints (Diarthroses)
Immovable joint (Synarthroses): No mobility e.g. sutures. Slightly movable joint (Amphiarthroses): Some degree of mobility e.g. vertebrae columns. Freely movable joints (Diarthroses): show maximum degree of mobility e.g. synovial joint.
It is based on type of connecting tissue and the presence or absence of joint cavity. The joints are classified into three types: a) Fibrous b)Cartilageous c) Synovial Structural Classification
Synarthrosis, a Greek word, means “with joint”. These joints are firmly held together by a thin layer of strong fibrous (connective) tissue, which serves a protective function. There is no movement between the bones such as the sutures of the skull and the teeth in their sockets.
Fibrous Joint: Here the bones forming the joint are united by fibrous connective tissue. These joints are either immovable or permit only a slight degree of movement. A fibrous joint lacks cavity. These are of three types: Suture, syndesmoses and gomphoses
Fibrous joints • Suture • Bones tightly bound by minimal fiber • Only found in skull • Syndemoses • Bones connected by ligaments • E.g. tibiofibular ligament, interosseous membrane of radius/ulna • Gomphoses • Peg in socket joint • Only found in teeth/alveoli Fig. 9.1 b, M&M Fig. 8.4, M&M Frolich, Human Anatomy, Mechanics of Movement
Fibrous joints • Suture • Bones tightly bound by minimal fiber • Only found in skull • Syndemoses • Bones connected by ligaments • E.g. tibiofibular ligament, interosseous membrane of radius/ulna • Gomphoses • Peg in socket joint • Only found in teeth/alveoli Fig. 9.1 c, M&M Frolich, Human Anatomy, Mechanics of Movement
Cartilaginous orAmphiarthroses (Slightly Movable) Joints • Cartilaginous joints are joints where the articular surfaces of the bones forming the joints are attached to each other by means of white fibro-cartilaginous discs and ligaments which allow only a limited degree of movement. They are of two kinds: (a) ligamentous, and (b) cartilaginous. Examples are the cartilaginous between the vertebrae, the cartilage in the symphysis which binds the pubic bones together at the front of the pelvic girdle and the cartilage in the joint between the sacrum and the hip bone. Midradioulnar, and mid-tibia-fabular joint are examples of ligamentous joints.
Cartilaginous Joint: In this bones forming are united by means of cartilage. These joints also lack cavity. Example : a)Symphysis pubis between two pubis bones. b) Intervertebral discs c) Manubriosternal joint.
Synovial orDiarthrosis Joints • These are freely movable joints, and have large range of movements. That is why they great importance in motor performance. Most of the joints in the body are of the synovial type. Their main characteristics are as under: • The ends of the bones are covered with a layer of smooth hyaline cartilage, called articular cartilage in the joint regions. This reduces friction at the point. It also prevents the joint from weaving on the bones, and helps absorb shocks. • The joint is completely enclosed by a bag-like capsular ligament which holds the joint together and helps to contain the synovial fluid.
The capsular ligament is lined with a synovial membrane. This membrane secretes synovial fluid into the synovial cavity and acts as a seal, waterproofing the joint. The synovial fluid, which contains high concentration of hyaulornic acid, lubricates the joint. • In addition to the capsule, the bones are also attached and held together by strong, tough ligaments made of dense connective tissue. These ligaments prevent dislocation during normal movement. • The articulating surfaces of adjacent bones are reciprocally shaped.
Synovial Joints These joint possess cavity. End of bones forming the joint are enclosed in a fibrous capsule, as a result they are separated by a narrow cavity. The articular cavity is filled with a fluid called synovial fluid. Synovial joints are the most freely movable joints. Fibrous capsule, ligaments, synovial membrane, articular cartilage are components of synovial joint.
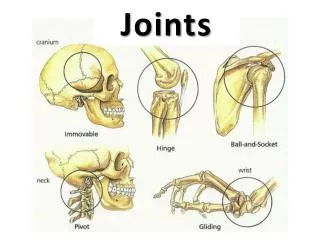
Synovial joints can be subdivided into ball-and-socket joints, hinge joints, gliding joints, pivot joints, condyloid joints and compound joints according to the type of movement they carry out:
Gliding Joints • This type of joint allows for gliding movements between flat surfaces as the surfaces slide over one another. Only a limited amount of movement is allowed such as the joints between the carpal bones (of the wrist), the joints between the tarsal bones (of the ankle) and those between the articular processes (zygapophyses) of successive vertebrae.
1) Plane/ Gliding joint: Articular surface is nearly flat. Permits gliding movements in various directions i.e. side to side, back and forward and slight rotation. Example: intercarpal joints, intertarsal joints, intermetatarsal, intermetacarpal. Classification of synovial joint according to shape
Hinge Joints These joints occur where the convex surface of one bone fits into the concave surface of another bone, so making movement possible in one plane only. Examples of these joints are the knee and the elbow joints, as well as phalanges. Hinge joints have ligaments mainly at the sides of the joints.
2. Hinge or Ginglymus joints • The articular surfaces are pulley shaped. • This is a uniaxial joint. • Movements are permitted only in one plane, much like the hinge of a door. • These joints have strong collateral ligaments to prevent the other movements. • Example: elbow joint, interphalangel joints, knee joint
Pivot Joints • These joints, which provide rotatory movement in a transverse plane about a longitudinal axis to the parts of the body, occur where: • a bony ring rotates round the pivot (axis) of another bone such as the ring-like atlas rotating around the odontoid process of the axis, allowing the head to turn from side to side. (atlanto-axial joint – articulation between atlas and axis of cervical vertebrae) • the end of one bone rotates round the axis of another bone such as the end of the radius rotating around the ulna as the palm of the hand is turned inwards or outwards.
3. Pivot joint • The articular surface of one bone is rounded and fits into the concavity of another bone. • This is a uniaxial joint. • The movement in a pivot has limited rotation. • Example radio-ulnar joint, atlanto-axial joint.
4. Condylar Joint • The round articular surface of one bone fits into socket type articular surface of another bone. • This is a biaxial joint. • The end of bone bearing round articulae surface is called condoyle. • These joints permits movements in two directions i.e. up and down and side to side. • Example, mandibularjoint.
Saddle Joints • This type of joint occurs when the touching surfaces of two bones have both concave and convex regions with the shapes of the two bones complementing one other and allowing a wide range of movement. The only saddle joint in the body is in the thumb. The movements this joint is capable of are flexion, extension, abduction, adduction with a limited degree of circumduction as in a condyloid joint.
5. Saddle Joint • The articular surface are reciprocally saddle shaped i.e. concavo-convex. • This is a biaxial joint. • This is modified condyloid joint that allows a wide range of movement. • Example, first carpo- metacarpal joint (Thumb)
Ball-and-Socket Joints • These joints are formed where the rounded head of one bone fits into the hollow, cup-shaped socket of another bone such as the shoulder joint and the hip joint. Such joints allow freedom of wide range of movements in all directions such as flexion, extension, adduction, and abduction, thus providing circumduction. In comparison to the hip joint, the shoulder joint is more freely movable because the shoulder blade is only loosely attached to the chest wall.
6. Ball and Socket Joint • Rounded convex surface of one bone fits into the cup like socket of another bone. • This is a multiaxial joint. • Movement occur in all directions. • This type of joint provide greatest range of movement of all the synovial joint. • Movements include, flexion, extension, abduction adduction, rotation and circumduction. • Example, hip joint, shoulder joint.
Biomechanics • Biomechanics is the study of the structure and function of biological systems by means of the methods of “mechanics.”, which is the branch of physics involving analysis of the actions of forces. Within “mechanics” there are two sub-fields of study: (1) statics, which is the study of systems that are in a state of constant motion either at rest (with no motion) or moving with a constant velocity; and (2) dynamics, which is the study of systems in motion in which acceleration is present, which may involve kinematics (i.e., the study of the motion of bodies with respect to time, displacement, velocity, and speed of movement either in a straight line or in a rotary direction) and kinetics (the study of the forces associated with motion, including forces causing motion and forces resulting from motion).
KINEMATICS • Kinematics is the study and analysis of the functional motions of mechanisms. It is the science of motion: of displacement, velocity, and acceleration. Motion must be produced by forces but the analysis of the forces that cause motion is a separate subject, called kinetics or dynamics. Newton’s law relating force F to acceleration a through mass M, F = Ma, relates kinematics and dynamics.
Scalar: Scalar is a quantity that is fully described by its magnitude; example: mass, time, distance, speed, temperature • Vector: It is a quantity that possesses both magnitude and direction; example: displacement, velocity, acceleration, force
KINETICS • Kinetics, the second aspect of dynamics, considers the force(s) which cause objects or bodies to move. It deals directly with the effects of forces upon the motions of material bodies. Importantly, all anatomical levers are pull-type machines, but push is mechanically inherent in the skill being performed as in “pushing” the shot. Levers in the body produce force to overcome resistance, which results in work. While performing the bench press, the force which your contracting muscles exert against a barbell is defined as tension, where as the force which is exerted against the muscle, by the barbell is called the load. It is this relationship, which must be calculated when considering force velocity. Conversely, a greater force produced by the load can and will stimulate a number of motor units to oppose that load. Kinetics is better exemplified by Newton’s Laws of Motion, so to say.
Motion – change of place or position of an object or a body – is the major point of discussion in kinetics. Here we account for force(s) that are responsible for causing objects or bodies to move vertically, horizontally or axially (spinning on their own axes). Motion is primarily studied under physics; it is also studied under sport academics because sport involves motion of muscles, joints and nerves in variety of perspectives (motor-skill learning, sports skill acquisition and stressful competitive situations) and combinations (as in simple locomotion of the limbs as in walking to performing highly complex somersault).
Types of Motion • When static balance has been upset, the body has been put into motion. Thus, that is implied is a change of place or position involving direction and speed. There are three major classifications of motion: • • Linear motion • Curvilinear motion • Rotary motion
Linear Motion (and the Related Concepts) • Linear motion is also known as translation or translatory motion, which means that a person is said to move as a whole with all parts moving in the same direction. If the path is straight, it is linear. Linear motion is also referred to as rectilinear motion, although it has become customary to use only the word linear. The distance moved (i.e., the linear displacement) is measured in linear measurement units, such as feet, yards, inches, metres, centimeters, miles, etc.
Curvilinear motion – also known as translatory non-rectilinear motion – is defined as an object that moves in a curved path. The motion has a horizontal (straight) component plus a force that pulls it inward. Rotary (or angular) motion occurs when some point within a system is secured or restricted so that the system will rotate around this point when it receives force. The point serves as its axis.
Inertia • When we see something or someone move we know a force is responsible for the motion. Instantly our attention is drawn to Newton’s first law of motion, which says that a body at rest will remain at rest unless acted upon by a force. This is called the Law of Inertia. The inertia of a person or thing is essentially its mass. Inertia is resistance to movement. The more mass (weight) a person or a body has the less easy it is to move it. Another way of saying the same thing is -- the more inertia a body or an object has, the more force will be required to move that person.
Force • A force may be generally defined as a push, pull or tendency to distort. In other words, if we see movement (push or pull) we know a force is present. The reverse is not necessarily so, however. It is possible to have a force (tendency to distort) without any movement. This would happen if the force were not of a magnitude sufficient to overcome the inertia of the body. The formula for calculating force is mass times acceleration.
Acceleration • Acceleration is defined as a change in velocity. Velocity is the rate (speed) at which a body might move per a specific unit of time (such as feet per second or miles per hour). Therefore, when we see a body change its velocity, we know a force has acted on it. In the simplest sense, this could mean that a body was standing still and then moved. It could also mean that a body was moving and then changed its velocity (as in speeding up or slowing down). If this were the case, again, we would know by Newton’s first law that a force is present.
We know this because Newton’s first law states that a body in motion will continue in motion in the same direction at the same velocity unless acted upon by some force. This introduces another possibility, that is, a body could move in one direction and then change direction. When this happens, we know that a force caused the change in direction.
Momentum • Once a body has been put in motion, it has momentum. How much momentum it has is determined by how fast it is moving and how much mass it has (by formula, Momentum = Mass x Velocity). This would imply that while a force acted on the body to move it (a force sufficient to overcome its inertia), the force is no longer acting on it.
Since Newton’s Law of Inertia says that the body will continue to move unless acted on by another force we would expect to observe the momentum of that body continue unless resistance forces (such as gravity, friction, or air resistance) slow it to a stop.
It should be obvious that it is going to take more force to move a large mass. Ten pounds is twice as much as five pounds. It will take twice as much force to move 10 pounds as it will to move five pounds. When enough force is applied to move either 10 pounds or five pounds and they were both given the same speed of movement (velocity), the 10-pound weight would have twice as much momentum. Remember that momentum is not just velocity.
While momentum is movement, it is made up of both velocity and mass. For example, it would take more effort (force) on your part to catch the 10-pound weight (twice as much effort) as it would for the five-pound weight if both traveling at the same speed (velocity).
First Law of Motion: law of inertia • Newton's First Law states: Every body perseveres in its state of being at rest or of moving uniformly straight forward, except insofar as it is compelled to change its state by force impressed.Otherwise known as Law of Inertia, this law is often simplified into the sentence "An object will stay at rest or continue at a constant velocity unless acted upon by an external unbalanced force". For example, the golf ball remains at rest until it is struck the golf club.
This is often paraphrased as "zero net force implies zero acceleration", but this is an over-simplification. (The key point here is that if there is no net force acting on an object (if all the external forces cancel each other out) then the object will maintain a constant velocity. If that velocity is zero, then the object remains at rest. If an external force is applied, the velocity will change because of the force). As formulated by Newton, the first law is more than a special case of the second law. Newton arranged his laws in hierarchical order for good reason. The significance of the first law is to establish frames of reference for which the other laws are applicable, such frames being called inertial frames.