Download
1 / 15
180 likes | 422 Views
Micromouse. Ryan Bidlack Jason Wells. Problem Statement. Design and Build an autonomous ‘mouse’ that will navigate its own way through a maze. Background.

E N D
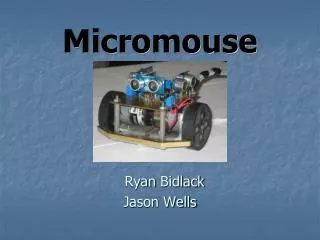
Micromouse Ryan Bidlack Jason Wells
Problem Statement • Design and Build an autonomous ‘mouse’ that will navigate its own way through a maze
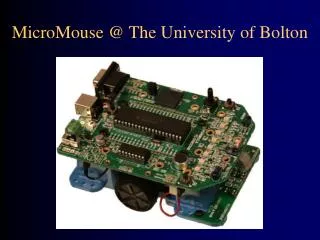
Background • Micromouse is an autonomous self contained machine designed to get to the center of a maze in the shortest possible time. A Micromouse essentially comprises of a drive motor or motors to move it; a steering and turning method; sensors to detect the presence or absence of maze walls; sensors or control logic to oversee the action of the rest and keep the vehicle 'on track' or to solve the maze; batteries to provide power. (techfest.org)
Event • Techfest 2009 • Student and Professional categories • This event is held every year in different locations around the world • Held in Bombay, India this year • INR 45,000 in prizes (approx $1000 USD)
Mouse Requirements • A Micromouse shall be self contained. • Micromouse must follow size constraints of 250 mm wide by 250 mm long. No height limit. • Micromouse must not be powered by a combustion or nuclear process • A Micromouse shall not leave anything behind while negotiating the maze. • A Micromouse shall not jump over, climb, scratch, damage, or destroy the walls of the maze.
Workload Breakup • Ryan Bidlack • Mechanical Design, Sensor control software, sensor interfacing. • Jason Wells • Mechanical Design, Motor control software, Circuit board design.
Maze characteristics • Painted Plywood floor • Unknown wall material • 168mm between walls
Drive train Wheels in center DC motors 2” rubber wheels Sensors and Control HC08 Ping sensors LM298 motor driver Current Design
Motors • DC motors are the best option due to ease of control • RPM’s needed to achieve 1ft/s = [12/(2”*3.14)]*(60) • Torque needed = (1”)(1lb)(2sf) • Motors need to minimally have 2 in-lb of torque and turn 115 rpm.
Motor Drivers • L298 Motor Driver Board • 6-24Vin • 5V at 4amps output
Sensors • Parallax Ping Sensor • Published working range of 2cm-3m • Tested Working range of 1cm-3m
Budget Total Allocated funds $400 Motor Drivers(1) - $18 Ping Sensors(3) - $89.97 Remaining Funds $292.03