Download
1 / 17
170 likes | 364 Views
ONU Micromouse. Spencer Cupp and Kiel Wood Dr. Khalid Al- Olimat – Advisor. Outline. Prototype System Overview Sensors Motor Control System Drift Correction Yaw Correction Algorithm Performance Conclusion Questions. Prototype. Prototype. System Overview. Sensors. Motor Control.

E N D
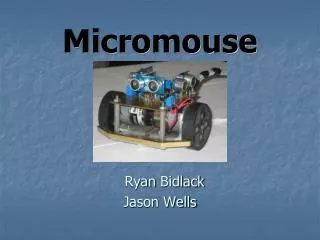
ONU Micromouse Spencer Cupp and Kiel Wood Dr. Khalid Al-Olimat – Advisor
Outline • Prototype • System Overview • Sensors • Motor Control System • Drift Correction • Yaw Correction • Algorithm • Performance • Conclusion • Questions
Arduino Uno Limitations • Has only 2 digital interrupt pins • SRAM • 2 kB • Stores the stack (restricts recursive calls) • Stores local and global variables • Flash Memory • 32kB • Stores program memory • Stores constant variables
Arduino Mega 2560 • Has 8 kB of SRAM • Has 256 kB of Flash Memory • Has 6 digital interrupt pins available
Algorithm • Flood Fill Algorithm • Pros • Provided great performance • Not very computationally intensive • Does not use up a lot of precious memory • Does not require mapping of the entire maze • Cons • Success is dependent on hardware performance • Once the Micro-mouse gets “lost” there is no recovery.
Conclusion • Functional prototype developed • Algorithm tested and verified in software and hardware • Various movement control systems implemented • Algorithm and movement control function in tandem • Third place in the 2013 SAC IEEE R2 Micro-mouse competition.