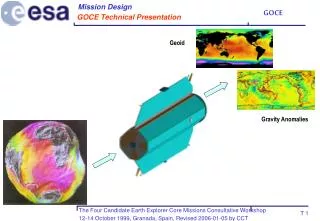
GOCE
GOCE. www.esa.int/livingplanet/goce. G ravity field and steady-state O cean C irculation E xplorer. The Very Basic Principles of the GOCE Gradiometer In-Flight Calibration. Daniel Lamarre ESA/ESTEC. Presentation of the Problem Quadratic Factor Adjustment Scale Factor &

GOCE
E N D
Presentation Transcript
GOCE www.esa.int/livingplanet/goce Gravity field and steady-state Ocean Circulation Explorer The Very Basic Principles of the GOCE Gradiometer In-Flight Calibration Daniel Lamarre ESA/ESTEC
Presentation of the Problem Quadratic Factor Adjustment Scale Factor & Misalignment Determination
Source of the Quadratic Factor Non-linearity present in G (electrostatic gain): a = c0 + c1 V + c2 V2 + …
Measuring the Quadratic Factor (1) Control Calibration Electrostatic Loop BW Signal Frequency Gain BW < 10 Hz 100 Hz > 1 kHz
In-Flight Measurement of the Quadratic Factor - No spacecraft motion necessary - Successive calibration of each direction of each accelerometer (3x6) - Gradiometer internal generation of calibration pulse trains - Synchronous detection (sign preserved) - Iterative adjustment: Measurement Adjustment Measurement Adjustment Measurement …
Scale Factor & Misalignment: Drivers • Gradiometer counts 6 3-axis accelerometers • Complete characterization of the gradiometer means: • 6 x ( 3 position coordinates + 3 scale factors + 3 x 2 angles) = 72 parameters • However: . Absolute scale factor known already to < 1% • . Accelerometer positions & pair orientations are restricted by tight manufacturing tolerances • Main Goal: In-flight calibration targetsscale factor & misalignment differences between accelerometers • Relative Calibration
Example: 1D Gradiometer (1) a1(t) = k1 a(t) + n1(t) a2(t) = k2 a(t) + n2(t)
Example: 1D Gradiometer (2) Assumptions: k1 = k – Dk /2 Dk << 1 k2 = k + Dk /2 k ~ 1 a1 = ( k – Dk /2 ) a a2 = ( k + Dk /2 ) a ( a2 – a1 ) = Dk a Linear regression: yi ~ Dk xi But xi are unknowns !
Example: 1D Gradiometer (3) Estimate of a: a’ = ( a1 + a2 ) /2 a’ = ( k – Dk /2 ) a + ( k + Dk /2 ) a a’ = k a ( a2 – a1 ) ~ Dk a’ ( a2 – a1 ) ~ Dk [ k a ] Linear regression retrieves Dk / k in a single computation
Example: 1D Gradiometer (4) a1 = ( k – Dk /2 ) a = k ( 1 – ( Dk / k ) / 2 ) a a2 = ( k + Dk /2 ) a = k ( 1 + ( Dk / k ) / 2 ) a Applying the correction with known Dk / k : a1’ = a1 / (1 – ( Dk / k ) / 2 ) = k a a2’ = a2 / (1 + ( Dk / k ) / 2 ) = k a a1’ - a2’ = 0
Example: 1D Gradiometer (5) Adding the signal from the gravity gradient: a1 = k1 ( a – g ) g < a a2 = k2 ( a + g ) Impact on the linear regression: Dependent: ( a2 – a1 ) = 2 k g + Dk a Independent: a’ = k a + Dk g / 2 Gravity gradient contributes as uncorrelated noise but also as a systematic error. The systematic contribution decreases with iteration.
For the real gradiometer: • Star tracker measurements are used also to retrieve angular rates and then centrifugal accelerations • Pseudo-random shaking provided by on/off cold gas thrusters & ion thruster • Empirical iterative retrieval algorithm • Assumption of grad’r parameters • Retrieval of dynamics & gradients • Retrieval of grad’r parameters • Retrieval of dynamics & gradients • ETC
Conclusion • 2 innovative calibration methods have been presented, both easy on the spacecraft • The quadratic factor measurement method is internal to each accelerometer • The scale factor and misalignment retrieval method requires only a random shaking of the spacecraft