Model Takagi – Sugeno – Kang’a - TSK
240 likes | 638 Views
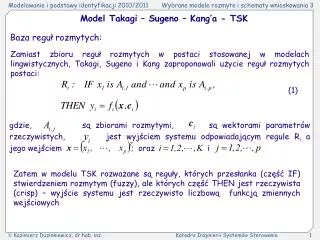
gdzie, są zbiorami rozmytymi, są wektorami parametrów rzeczywistych, jest wyjściem systemu odpowiadającym regule R i a jego wejściem ; oraz i. Model Takagi – Sugeno – Kang’a - TSK.

Model Takagi – Sugeno – Kang’a - TSK
E N D
Presentation Transcript
gdzie, są zbiorami rozmytymi, są wektorami parametrów rzeczywistych, jest wyjściem systemu odpowiadającym regule Ri a jego wejściem ; oraz i Model Takagi – Sugeno – Kang’a - TSK Baza reguł rozmytych: Zamiast zbioru reguł rozmytych w postaci stosowanej w modelach lingwistycznych, Takagi, Sugeno i Kang zaproponowali użycie reguł rozmytych postaci: (1) Zatem w modelu TSK rozważane są reguły, których przesłanka (część IF) stwierdzeniem rozmytym (fuzzy), ale których część THEN jest rzeczywista (crisp) – wyjście systemu jest rzeczywisto liczbową funkcją zmiennych wejściowych
W modelu TSK przyjmuje się aktualne wejścia typu singleton Funkcje fi mają zwykle tą samą strukturę a różnią się parametrami w poszczególnych regułach Ri Funkcje fi mogą być funkcjami wektorowymi – ograniczymy się do funkcji skalarnych
Przecięcie zbiorów – t - norma Dla wejścia rzeczywistego wektora , wyjście systemu jest średnią ważoną wartości (2) gdzie, waga wiokreśla ogólny stopień prawdziwości przesłanki reguły Ri dla danego wejścia i jest obliczana jako (3)
Prostym i praktycznie użytecznym jest afiniczna funkcja konkluzji; wówczas reguła Ri ma postać Mówimy wówczas o afinicznym modelu TS Szczególnym przypadkiem tego modelu jest singletonowy model TS
Model afiniczny TSK - wnioskowanie Średnia ważona
Ilustracja R1: IF x is A1 AND y is B1 THEN z1 = p1x + q1y + r1 R2: IF x is A2 AND y is B2 THEN z2 = p2x + q2y + r2
Przykład: Jeżeli x jest MAŁY TO y = 0.1x + 6.4 Jeżeli x jest ŚREDNI TO y = -0.5x + 4 Jeżeli x jest DUŻY TO y = x - 2 System TSK jako nieliniowy interpolator pomiędzy liniowymi systemami statycznymi
System TSK może być wykorzystany jako nieliniowy interpolator pomiędzy liniowymi systemami dynamicznymi Ciągły system rozmyty: Dyskretny system rozmyty:
W powyższych modelach: Mij – zbiory rozmyte, r – liczba reguł - wektor wejścia - wektor stanu - wektor wyjścia - macierze współczynników - są znanymi zmiennymi przesłanek, które mogą być funkcjami zmiennych stanu, zakłóceń, czasu ,……
Wyjścia systemu: - ciągłego - dyskretnego
Model Tsukamoto Baza reguł rozmytych: Zbiór reguł ma strukturę bazy reguł modelu lingwistycznego postaci: (1) Ci - zbiory rozmyte o monotonicznych funkcjach przynależności (malejące lub rosnące)
Przecięcie zbiorów – t - norma Dla wejścia rzeczywistego wektora , wyjście systemu jest średnią ważoną wartości (2) gdzie, waga wiokreśla ogólny stopień prawdziwości przesłanki reguły Ri dla danego wejścia i jest obliczana jako (3) Wartość yi obliczana jest (4)
Ilustracja R1: IF x is A1 AND y is B1 THEN z = C1 R2: IF x is A2 AND y is B2 THEN z = C2
Modele rozmyte mogą użyte do modelowania obiektu sterowanego i sterownika (regulatora) Przykład Chcemy zbudować prosty regulator siły ciągu odkurzacza Przyjmujemy początkowo, że regulator powinien określać siłę ciągu w zależności od stopnia zakurzenia powierzchni odkurzanej – regulator: jedno wejście - Surface i jedno wyjście - Force Ustalamy wartości lingwistyczne wejścia: Very Dirty, Dirty, Rather Dirty, Almost Clean, Clean Ustalamy wartości lingwistyczne wyjścia: Very Strong, Strong, Ordinary, Weak, Very Weak
Proponujemy tablicę reguł regulatora: S(urface) F(orce) V(ery) D(irty) V(ery) S(trong) D S Pięć reguł O RD W AC C VW Krok następny: zdefiniowanie funkcji przynależności wartości wejścia i wyjścia – zadanie do samodzielnego rozwiązania
Modyfikacja regulatora: wprowadzenie drugiego wejścia – Surface Type Ustalamy wartości lingwistyczne drugiego wejścia: Wood, Tatami, Carpet Proponujemy tablicę reguł regulatora: S D C RD VD AC ST O S W VW VW Wo Piętnaście reguł Ta W S VS VW O W O VS O S Ca F Krok następny: zdefiniowanie funkcji przynależności wartości wejścia i wyjścia – zadanie do samodzielnego rozwiązania
Przykład Chcemy zbudować regulator rozmyty stabilizujący prędkość samochodu Przyjmujemy, że regulator powinien określać siłę ciągu w zależności od uchybu prędkości i przyśpieszenia Pożądana prędkość: v0 = const Wyjście regulatora: Wejścia regulatora: Siła ciągu Uchyb prędkości Prędkość pożądana Prędkość aktualna Przyśpieszenie
Struktura układu sterowania Prototypowanie układu sterowania w środowisku MATLAB/Siomulink
Ustalamy wartości lingwistyczne wejścia Velocity Error (VE): Negative Error (NE), Zero Error (ZE), Positive Error (PE) Ustalamy wartości lingwistyczne wejścia Acceleration (A): Negative Acceleration (NA), Zero Acceleration (ZA), Positive Acceleration (PA) Definiujemy funkcje przynależności ustalonych wartości wejść
Ustalamy wartości lingwistyczne wyjścia Engine Force: Minimum (Min), Normal, Maximum (Max) Definiujemy funkcje przynależności ustalonych wartości wyjścia
Konstruujemy tablicę reguł (model) regulatora rozmytego Dziewięć reguł Powierzchnia odpowiedzi regulatora rozmytego