Download
1 / 57
580 likes | 733 Views
Register Transfer Level design. Workshop on VLSI Design Using the Interactive Design and Simulation System dr.ir. Ad C. Verschueren. Contents. Basic idea, do-it-yourself demo, when to use The basic building blocks available in IDaSS Describing combinatorial logic

E N D
Register Transfer Level design Workshop on VLSI Design Using theInteractive Design and Simulation Systemdr.ir. Ad C. Verschueren
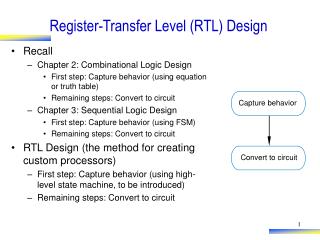
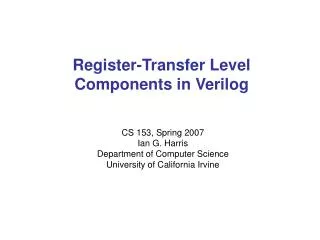
Contents • Basic idea, do-it-yourself demo, when to use • The basic building blocks available in IDaSS • Describing combinatorial logic • State machines and distributed control • Hierarchy, re-use and parametrisation • Timing simulation and optimisation • Synthesizing a design
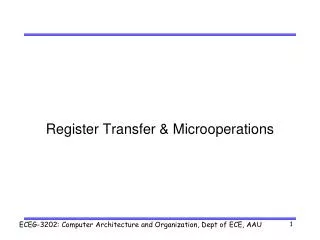
What IS RTL design? • An abstraction level close to digital hardware • values stored in 1-D and 2-D arrays of bits • arithmetic/logic operations in combinatorial blocks • buses transfer values between stores and op’s • FSM’s control storage, operations and transfers • Our restriction: synchronous systems only • storage and FSM transitions on a single clock • gives well-defined ‘state’ of the system • facilitates automated testing of final hardware
The basic ideas of abstract RTL design • Build and simulate using ‘Basic Building Blocks’ • each of these represent familiar RTL constructs • direct implementation in digital circuitry possible • More abstract than normal RTL • large number of combinatorial operators predefined:less need to work at logic gate level • control and test pathways abstract and hidden:no need to draw or encode them • clock and system reset assumed present but hidden
Basic ideas of interactive RTL design • Schematics for (hierarchical) system structure • visual structure and (data) interconnections • immediate simulation of any addition/change • Texts for complex block behaviour • separate languages for each behaviour type • behaviour chopped up in small text parts • immediate simulation after saving (and compiling) • Editing, simulation and debugging integrated • build system in small (fully debugged) steps
Do-it-yourself demo time with IDaSS! • Start VisualWorks Smalltalk, if not running yet(look for the ‘icecone’ icon on your screen) • Follow the steps in the ‘do-it-yourself demo’in chapter 7 of the IDaSS ‘short form’ manual
Advantages of abstract/interactive RTL • It saves design time • graphics and text languages optimised and abstract • it is easy to re-use and modify existing parts • annotation and documentation built into system • It produces better debugged results • most errors are caught as they are entered • full control of system state eases testing/debugging • stepwise building gives error confinement
Advantages of abstract/interactive RTL • It allows for innovative (and better) designs • there simply is time to try design alternatives • Basic Building Blocks provide complex functions: • FSM’s with subroutines and ‘interrupts’ possible • registers with local operations and ‘semaphores’ • concurrent control of design elements is allowed • specialised memory types available (FIFO/LIFO/CAM) • It is hardware implementation independent • VHDL/Verilog/… conversion by an expert system • fully retargettable to different ASIC/FPGA tools
When to use RTL • In general: if you know a fitting RTL architecture • if you are thinking at RTL level - use it directly! • For high amounts of synchronous concurrency • there is a lot done in parallel on each clock • distributed control: FSM controller may be absent • values directly control operations - difficult to design • examples found in pipelined / SIMD machines • If you want to be certain hardware can be made
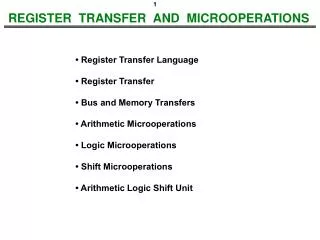
Overview of IDaSS RTL building blocks • Storage in registers and memories: • RAM’s and ROM’s can have several technologies • FIFO’s, LIFO’s and Content Addressable Memories • Combinatorial functions: • ‘operator’ blocks for generic ALU-like functionality • three-state buffers and ‘constant generators’ • Control by FSM’s and local ‘control inputs’ • ‘signals’ provide communication between FSM’s • Hierarchy and reuse with (multiple) schematics
The IDaSS register (1): overview • Basic 1-D storage for 1..64 bits • with a semaphore bit indicating it has been written • can be fitted with one input and/or (TS) output • system reset value can be defined • Value is either known (0..2n-1) or UNKnown • IDaSS does not regard a value as a bit-vector! • Buses also know two other ‘values’:TS (Three-State) and OVL (overload)
The IDaSS register (2): commands • Local clock synchronous operations: • ‘hold’, ‘load’*, ‘inc’(rement), ‘dec’(rement), ‘ldinc’* (load incremented), ‘lddec’* (load dec.), ‘write: value’*, ‘setto: value’ • one of these is default (selected by designer), executed if no command is given • ‘reset’ overrules other commands above (value can be set separately) • ‘ressem’ resets the semaphore bit (setting with * commands takes precedence)
Memories (1): overview • Provide 2-D storage 1..64 bits, 2..64K words • contents viewed/edited with separate window • can be saved to- and loaded from Intel HEX files • 5 (FIVE) different basic memory types: • ‘Random Access Memory’ - RAM (also ‘register file’) • ‘Read Only Memory’ - ROM • ‘First-In-First-Out’ memory - FIFO (= ‘queue’) • ‘Last-In-First-Out’ memory - LIFO (= ‘stack’) • ‘Content Addressable Memory’ - CAM
Memories (2): port overview • Four basic types of read/write ports: • read-only: address input, (TS) data output • timing options from asynchronous through pipelined • write-only: address and data inputs • read/write: addr. and data inputs, (TS) data output • combined read/write-only with concurrency control • fixed address: (TS) data output • Reading/writing controlled by commands • sent to memory or individual port (address input)
Memories (3): use of ‘technologies’ • Implementation limitations set by ‘technologies’ • these are stored in a separate ‘technology file’ • the ‘IDaSS default technology’ removes limitations,but is not synthesizable! • choosing a memory technology… • places additional limitations on the maximum size • limits the amount, types, combination and technologies for the read/write ports • a port technology limits or even fixes setting options
Memory workshop (1) • Create a 4 Kbyte RAM with 1 read/write port: • output should be continuous and latched • reading pipelined, 3 clocks command to output • writing also pipelined, writing in 2nd clock • concurrent read/write NOT allowed • Check if it is working as you expect it: • registers at address/data inputs, viewer at output • memory editor window for looking at contents • use menu’s for giving and checking commands • it’s synchronous, so use the ‘CLOCK STEP’!
Memory workshop (2) • Create a 16 byte LIFO (stack) memory • use the ‘register file based’ technology • add ‘top of stack’ & ‘next of stack’ outputs (these are implemented as fixed address ports) • add a main write data input, driven by register • Play around with it and check what it can do • memory viewer uses [I]nsert and [R]remove keys • check commands like ‘push’, ‘pop’, ‘swap’ etc.
Combinatorial logic • IDaSS provides 3 fully combinatorial blocks: • a simple Three-State buffer • knows ‘enable’ or ‘disable’ commands, depending on the default state of the output • a ‘Constant Generator’ with a single (TS) output • knows ‘setto: value’ commands, these automatically enable a TS output if present • default value can be specified • the general purpose ALU-like ‘operator’ block
Operator blocks (1): overview • The ‘operator’ is the main combinatorial block • number of inputs and (TS) outputs unlimited • It can execute several functions, like an ALU • each function has a name defined by the designer • only one function can be active at a same time • function names are also used as (async) commands • first function created becomes default function • Each function defined separately as a text • a set of expressions generating outputs from inputs
Operator blocks (2): expression syntax • Basic expression syntax follows that of Smalltalk • three basic types of operators: • unary: out := in not • binary: out := in1 /\ in2 “logical AND” • keyword: out := in from: 1 to: 4 • precedence rules are extremely simple: • unary and binary strictly from left to right • first unary, then binary, keyword op’s come last • keyword op’s must be separated with braces ()
Operator blocks (3): allowed variables • Variables at left hand side of := • output connector names (width must match!) • temporary variables (start with underscore ‘_’ ) • Variables at right hand side of := • input connector names • constants (any Intel/Motorola notation is allowed) • already defined temporary variable names • output name followed by ‘width’ operator • (numerical parameters)
Operator blocks (4): some remarks • Expressions are separated with a period • An unassigned output generates ‘UNK’nown • More than 60 basic operators available: • arithmetic: dec, inc, neg, +, -, * (4x), shift, rotate…. • logic: standard op’s plus parity, majority, priority…. • signed and unsigned comparisons • bit (field) extraction and concatenation, merging, multiplexing, checking and changing bit widths…. • use [F1], ‘subjects’, ‘operators’ for more information
Operator examples • Explicit multiplexing: use ‘if0:if1:’ operator • out := selectBit if0: input0 if1: input1 • Implicit multiplexing: use separate functions • “select_0 function:” out := input0 • “select_1 function:” out := input1 • Question: does this swap nibbles in a byte? • out := in from: 0 to: 3 , “concatenated with” in from: 4 to: 7
Operator workshop • Investigate the ALU operation in ‘up8048n.des’ • open this design with ‘File’, ’load system’ • use ‘edit’, ‘functions…’ in the ALU block • use ‘Edit’, ‘select function’ in the function editor • Create and test a rotating priority encoder • 8 bits wide main input, 3 bits ‘lowest prio bit’ input • 8 bits wide 1-of-8 mask output, indicating highest priority active input (prio increases towards MSB) • hint: rotate-prio-rotate back. Try bit number output?
Control functionality • IDaSS has 2 methods to control a design: • centralised control with ‘State Controllers’ • Mealy/Moore FSM’s, also microprogram controllers • favor hierarchical control (can access subschematics) • can be controlled themselves with commands • distributed control with ‘control inputs’ • direct translation of bus value in local commands • Many-to-one control is allowed • as long as given commands do not contradict
State controllers (1): overview • Basically, a collection of states • each defined with a separate text • numbered for default state transition ordering • user defined name labels for non-default transitions • Optionally, a sub-’routine’ stack can be added • allows sequences of states to be shared • ‘interrupt’ facility with ‘call: statename’ command • Possibility to switch a controller off exists • this holds state and suppresses commands
State controllers (2): state text format • State text may start with a label • … a name followed by a colon, like ‘fetch:’ • an unlabeled state must start with a colon! • Followed by a list of commands • basic command starts with target block/connector • followed by abstract command (optional parameter) • commands separated by semicolons (‘;’) • only last command in list can be state transition
State controllers (3): target formats • Command targets are referred to by name • block in local schematic - simple name:ACCUREG load; • connector on block with ‘\\’:ALU \\ busOutput enable; • block in (nested) sub-schematic with ‘\’:STAGE1 \ REGISTERS \ PCREG inc; • combinations possible:STAGE2 \ REGFILE \\ wrAddrInput write;
State controllers (4): command formats • Three main formats for actual commands • simple commands - simple names:ALU add; • numeric value parameter commands:CARRYFLAG setto: 1b; “direct constants!” • name parameter commands:FETCHCONTROL goto: prefetchState; • State controller can give commands to itself • two commands only (‘reset’ and ‘stop’):stop; “no need to name target here”
State controllers (5): state transitions • State transitions defined ‘graphically’ • goto a named state: -> decode • hold current state: << • goto next numbered state: >> • ‘call’ a state, pushing next numbered state:=> handleInt • ‘call’ a state, pushing specific return state:=> getParam , decode • ‘return’ to state on stack: <= • ‘return’ but discard stack: <= handleError
State controllers (6): test blocks • Test blocks provide conditional execution • use a test expression to obtain a value from system • same syntax and basic operators as operator block • can use local temporary variables and expressions • final expression without assignment provides value • look like a CASE statement testing this value • branches have activation values and command chain • activation values may overlap between branches • evaluation only stops on active transition command • test blocks may be nested (seen as one command)
State controllers (7): test sources • Sources specified like command targets • returned value depends on tested block typeSTATUSREG at: 2 “value of register”DATASTACK + 3 “word at top of LIFO stack” • connectors test value on attached busEXECSTAGE \ ALU \\ inputA = 0B5h • special tests performed with appended ‘?’INPUTREG ? not “test of semaphore bit”MUX \\ output ? “internal value of TS output” • ‘??’ on register tests semaphore and gives ‘ressem’
State controllers (8): activation values • Activation values control test branch execution • uses comma separated list for multiple values • absence of values activates on non-zero test result • values come in several forms for convenience13, $5A, 23o, “Intel/Motorola constants” %01x0, 3x20q, “don’t cares (‘q’ = 4-level)” 4..7 “value ranges” • no problems with overlapping values in a branch! • command chain starts immediately after last value
State controllers (9): test block syntax • Test blocks delimited with square brackets • Each case branch starts with a vertical barprefetch: “State label” [ INT_REQ_REG “Test expression” | 0 ROM read; “Value 0 branch” -> startDecode | -> handleInt “Non-zero branch” ] “End of test & state”
State controllers (10): some remarks • State controllers have external commands • ‘goto: stateName’ overrules internal transition • ‘call: stateName’ stores internal next state • ‘reset’ clears stack and forces to first state • ‘start’, ‘stop’ and ‘hold’ control overall activity • Non-hierarchical communication with ‘signals’ • single bit ‘semaphores’, managed from top level • four different types, three commands, two tests... • See help file for more information!
State controller workshop • Load the ‘up8048n.des’ design file • open a state editor on the ‘CONTROL’ block • study the ‘exec1’ state (rather complex!) • can you find overlapping test values? • does this make any sense? discuss! • Other good examples in ‘communic.des’...
Control inputs (1): overview • Provide fully local, low abstraction control • commands given to block in which they are placed • impossible to control other blocks directly • translate attached bus value into commands • values defined numerically, encoding by designer • Fully combinatorial, no ‘state’ of any kind • bus value change immediately changes commands • Meant for distributed control, f.i. in pipelines
Control inputs (2): basic textual syntax • Simplified state controller test block syntax • no test expression needed nor present • by default, tests full bus value • possible to specify bit field(s) to test on bus • activation value lists exactly the same • local control only: no target name (path) present • commands for connectors use different format“state controller:” REG\\output enable;“control input:” enable: output; • command chain ends with period, not vertical bar
Control inputs (2): bit field syntax • Extract and concatenate bit fields from bus • each field can be single bit or range of bits • fields separated by comma’s, enclosed in braces • example: test bits 7,4,3,2 (in that order) from bus(7, 2..4) • Also allowed for numeric value commands • these add constant and parameter fields • example: 4 bits of ‘tag’, constant 101b, bus bit 7write: (__tag width: 4, 5 width: 3, 7)
Control input workshop • Create a 3 bits register with system reset to 0 • add a continuous output and 3 bits control input • connect these connectors with a bus • Try to obtain the following functionality: • register should increment on values 0, 1 and 2 • register should decrement on values 5, 6 and 7 • register should reset (to 0) on value 4 • register should be loaded with 7 if value is 3
Schematics, re-use and parametrising • Schematics are used to provide hierarchy • schematic symbols package sub-schematics • Complete schematics may be re-used • different symbols may point to same sub-schematic • ‘Multiple schematic’ = extreme form of re-use • stack of numbered schematics connected in parallel • Parameters (numerical) can change behaviour • name/value pairs attached to schematics
Schematic basics • Data buses cross boundary with ‘feedthroughs’ • special type of connectors placed within symbol • ‘connector’ blocks on sub-schematic (with conn.) • connection made by using same name • buses connected to feedthroughs become one bus • Control and test channels use ‘path’ notation • already introduced in state controller: ‘\’SUBSCHEMA \ BLOCK
Schematic re-use • On adding a sub-schematic block, you can… • create a new symbol or copy an existing one • copied symbols can be changed individually • create a new sub-schematic or re-use existing one • re-used schematic designs are linked together • re-used schematic states are separate (of course) • re-use does not allow cycles in system hierarchy! • Copying a symbol AND sub-schematic is easy • save to- and load from the ‘temp’ file: no linking
Multiple schematics • A stack of identical re-used sub-schematics • each identified by a unique (64 bit) number: a ‘tag’ • tags need not be sequential • designer can add and remove tags at will • Data bus feedthroughs connected in parallel • sub-schematics can communicate directly • Command and test channels are separated • path must include the tag between square brackets:REGISTERS[5]\BUSMUX useAuxBus;
Parametrisation (1): types and uses • Named parameters can influence behaviour • numerical value parameters have different uses • replace constants, f.i. reset value of a register • control default functionality, f.i. for a TS output • can be used as 64 bit value in expressions by preceeding parameter name with double underscore • string value parameters can control ROM contents • …by containing the file name of an Intel HEX file
Parametrisation (2):definition and tags • Parameters are attached to design hierarchy • basically, to any schematic contents or symbol • also to the ‘instances’ within a multiple schematic • each tag can have ‘instance initialisation parameters’ • search order is well defined: • first instance, then symbol, then contents • if name not found, go up in the hierarchy and repeat • Multiple schematic tags are special parameters • predefined parameter name ‘tag’ for local multiple • ‘tag1’, ‘tag2’…. for higher hierarchical multiples
Re-use workshop • Load design ‘communic.des’ • use comment window to read attached comments • open schematic windows on both sub-schematics • move viewers around and see what happens • figure out how/where the reset value of the ‘GEN’ register in ‘DP2’ is defined and change this value
Timing simulation (1): introduction • IDaSS performs full timing simulation • simulation time step is 10 femtoseconds • maximum delay is 1 DAY, no simulation time limit • is switchable: ‘fast simulation’ turns timing off • is worst-case: assumes NO optimisations at all • Simulates clock-to-output and delay times • timing (calculations) specified in technology file • Checks (calculated) input setup times • any violation aborts simulation run by default
Timing simulation (2): delay components • Fixed delays for synchronous elements • clock-to-X and setup times, data and commands • Fixed delays for asynchronous elements • async read ports, tests-to-commands in FSM’s…. • Basic expression operator delays • CPA for source-to-result of complete expressions • output multiplexer delay for operator block added • Clock cycle and reset-to-first-clockAll of these can be overruled by user!
Timing simulation (3): ‘default technology’ • File ‘idass.tec’ uses an abstract delay model • where possible, based upon fixed gate delays • inverting gate: 2 ns • non-inverting gate: 3 ns • elsewhere, calculated guesses have been used • basic clock cycle set to 100 ns (50 gate delays) • reset to first clock is 500 ns (time to stabilise) • ‘Rule of thumb’ factors usable for true delays • 1 mm CMOS is 5 x faster than abstract delays