Download

1 / 12
140 likes | 414 Views
ELG3336 - Remote Controlled Boat. Group B01 Tarek Yakub – 4133137 Fahad Aljenaei – 4290975 Danish Qureshi - 417235. Project Background. Major Electrical Components Pulse Width Modulation (PWM) Remote Control Potentiometer Major Mechanical Components

E N D
ELG3336 - Remote Controlled Boat Group B01 TarekYakub – 4133137 FahadAljenaei – 4290975 Danish Qureshi - 417235
Project Background • Major Electrical Components • Pulse Width Modulation (PWM) • Remote Control • Potentiometer • Major Mechanical Components • Creating a body that can float on water • Fans to propel boat forward
PWM (IC 555 timer) • How it works? • Uses square voltage pulses that power a motor • The amount of power applied to the motor depends on the duration of each pulse • The higher the duration of the pulses results in an increased average power applied to the motor
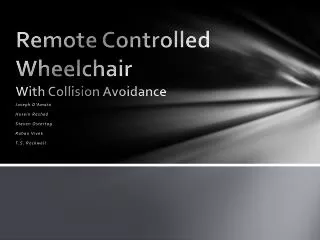
The Boat • The boat was made out of swimming noodles held together using metal bars • Holes were drilled through a piece of wood to hold the motors in place and mounted on the boat using metal brackets and screws
Propulsion • The boat is powered by two computer fans which have been attached to the output shafts of 6V motors
By adjusting the potentiometer, the boat is able to move forward at variable speeds. • By varying the speed of one motor at a time allows the boat to turn left or right
The Boat in Motion • This video shows the boat slightly turning right and left, as well as slowing speed while moving forward
Complications • Building the circuit • Low voltages across the motor • Not enough current going into the motor • Solutions to these problems • Changed one of the capacitors and removed one of the resistors • To deliver the proper amount of current into the motor (1.8 A) • Changed Potentiometer (from 100 kOhms, to 10 kOhms because resistance was to high) • This was found through trial and error (at 100 kOhms the current was 428 mA, at 10 kOhms the current was 2.4 A, 6 times greater!) • Used multi-sim to aid in problem solving • Choosing a PWM over the variable resistor due to heating up and also make use of IC 555 timer as we learned
Improvements/Modifications • Larger Fans • More powerful motors • To increase speed • Place the fans further apart • To allow the boat to turn easier • Wireless control