Download
1 / 18
180 likes | 292 Views
This seminar discusses innovative resource management in sensor networks, utilizing Kalman filters to enhance communication and power efficiency. By allowing base stations to passively wait for sensor updates while maintaining stale copies of readings, we reduce overall communication costs, power consumption, and computation demands. Key improvements involve predicting sensor behavior based on historical data, thus enabling efficient data transmission and reduced bandwidth usage. The technique includes Dual Kalman Filtering for better synchronization between sensors and base stations, highlighted through experimental results.

E N D
Adaptive Stream Resource Management Using Kalman Filters Aug 6 2004UCLA DB seminar
Paradigm • Base station passively wait for sensors update • UCSB • Stanford (STREAM) • U Maryland • Brown (Aurora) • U Pennsylvania • Cornell (Cougar) • Base station can actively contact specific sensors • Berkeley (TinyOS / TinyDB) • Brown (Aurora)
Motivation • Reduce communication cost • Reduce power consumption • Reduce bandwidth • Reduce computation cost at base station • Tradeoff : imprecise answer
Basic approach • Base station keep a stale copy of sensors reading • Sensors update only when reading fall out of boundary
Improvement • Sensors readings are predictable • Location of moving objects • power usage • Temperature • Heart-beat rate • Network traffic • Precipitation?
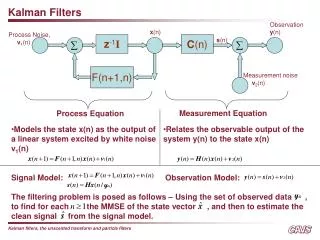
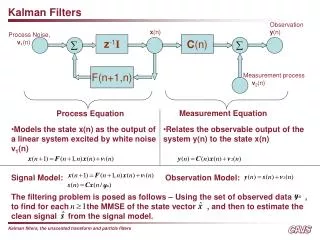
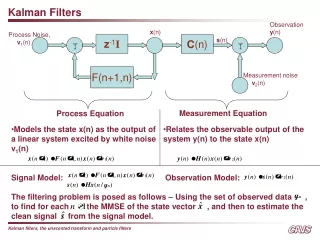
Kalman filter • Prediction of discrete time linear system
Kalman filter I • x – stateu – user inputa – relation between successive statesb – relation between input and state
Kalman filter II • w - noise
Kalman filter III • z – measurementv – measurement noiseh – relation between measurement and state
Dual Kalman Filter (DKF) • Base station and sensors maintain the same Kalman filter
Conclusion • Shift “intelligence” (computation) to sensors • Compressing Historical Information in Sensor Networks A. Deligiannakis, Y. Kotidis, N. Roussopoulos in SIGMOD 2004 • Optimization of Online, In-Network Data ReductionJ. M. Hellerstein, W. Wangin International Workshop on Data Management for Sensor Network 2004