Download
1 / 17
180 likes | 424 Views
ITS, Logistics & self-organization. Outcomes of challenge at TNO 19-21 November 2012. Participants: Tariq van Rooijen (Mob), Laura Daniele (ICT), Jacueline de Putter (LOG), Tjerk Bijlsma (ITS), Teije Gorris (Mob), Lori Tavasszy ,

E N D
ITS, Logistics & self-organization Outcomes of challenge at TNO 19-21 November 2012 Participants: Tariq van Rooijen (Mob), Laura Daniele (ICT), Jacueline de Putter (LOG), TjerkBijlsma (ITS), Teije Gorris (Mob), Lori Tavasszy , Zoltan Papp, Albert Veenstra, Egbert Guis, Maarten Oonk, Nico Zornig. Several external people were interviewed.
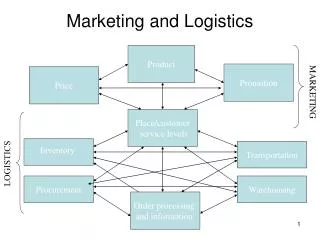
Organization architecture • Business models • Business processes • Data Sets • IT Solutions • Security • Interoperability • Governance ITS & Logistiek“anatomie” • Freight management • ERP/WMS integratie • Ketensynchronisatie • Van TMS naar MTMS • Synchromodaliteit • Empty container trips • Gekoppelde TMS / FMS • Capaciteitsveiling • Dynamischeritplanning • Cooperatief VM • Cooperatiefrijden • Verkeersinfo sourcing/productie
Problem • Both 1) end requirements on the system and 2) pressure to execute are increasing ( optimize, heal, configure) • Congestion, external impacts (traffic & transport management) • More and more severe disturbances (black swans, system failure) • Services: huge customization and responsiveness drive • Logistics and mobility already exhibit high level of self-organization, which is critical to operate the system • But: slow, uninformed, unconnected • Moreover, ITS (pax) and TMS (freight) technologies are vastly different and central integration at a systems level is difficult if not undoable Self-organizing capabilities need to improve
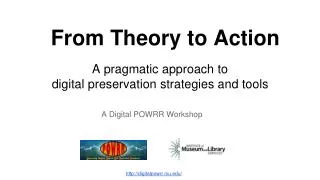
Logistics & ITS evolving • Convergence • & integration • Roadside/car • Multimodal • Multi-user Distributed • ITS deployment • Roadside • Cars • TMS ? 2012 Degree of self-organization Centralized control 1990 Level of information, communication
Links between cooperative traffic systems and self-organization Cooperative systems (make vehicles and infra cooperate): • Implement cooperation at the level of an acting entity • Enable (local) system users to act • Relies on data streams from their environment • Are not necessarily decentralized • There is not necessarily a global order defined (e.g. CACC) Opportunity: • CS can be a means to realize self-organization • CS can be part of a bottom-up approach for self-organization in cooperative mobility/Intelligent traffic systems
Links between logistics systemsand self-organization • SO already functions, albeit in “analogous” mode • Megatrend: automation and connection of transport and warehouse management systems • Collaborative traffic information (e.g. GOFER) • Dynamic (synchromodal) transport management • Sharing/auctioning of transport capacity • Chain synchronization: from TMS/WMS links to 4C • Opportunities & threats • Logistics IT may empower decentralagents • Centralization tendencies in IT are dominant on the short term!
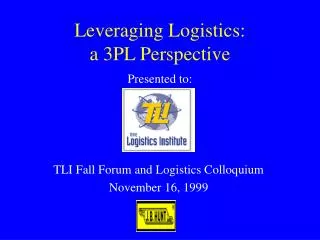
- RITS, FREILOT, Demanes Present - NLIP, control towers, smart hubs, synchro; few or no linkages with ITS ITS: car focus e.g. modeller Speed advise - Multi Agent planning SO elements in: KATE CACC RITS SO elements in: Demanes iCargo Seacon NGI port apps
Future: integrate SO in Logistics/ITS • Integration focus of technology (use): • Data sourcing, mining , fusion networks • Info: personalized, proactive, predictive apps • Decision = collaborative & agent based
Promising areas for SO in LOG/ITS • Urban area traffic optimisation • Smart truck parking • Platoon formation • Travel prediction/re-routing (esp. after incidents) • Terminal/road capacity management • These problem areas are well known and many R&D projects have tried to tackle them. • Focus has been very much on either passengers or trucks, however, and often from a centralized paradigm • Suggested test areas for SO
1. Urban area traffic optimisation Problem: • Congestion related to amount of traffic and blockades • Freight and passenger actions are unconnected • Inflexible roundtrip planning for freight • Max emission levels exceeded frequently Solutions: connected multimodal, multi-user traffic management based on joint “smart city” objectives. Automated, autonomous, objective led, route and parking guidance. Prerequisites: • For freight: adaptive and collaborative tour planning • Information sharing of routes and deliveries • Customised traffic management based on individual needs (trucks, cars) • Traffic management based on KPI’s (priority, emissions)
2. Smart truck parking Problem: • Drivers need to comply with driving time regulations • Trucks cannot find a suitable parking spot (=> safety, social issues) Solutions: trucks inform each other on availability and quality. Slot management combined with routing and fleet management. Prerequisites: • Dynamic information on supply and demand of parking space • High enough penetration rate (ubiquitous information devices) • Barriers and gaps: Freedom of truck drivers, Investments in IT and enforcement, Data sourcing (sensoring)
3. Platoon formation Problem: • Trucks do not know how to set up a platoon • Inefficient fuel use • Reduced throughput network Solutions: trucks communicate their own position/destination and find each other in space and time to group and create platoons. Prerequisites: • Mechanism to find trucks with same travel direction and dimensions at strategic locations • Reroute possible based upon platooning optimisation (dynamic planning) Barriers & gaps • Splitting and (de-)merging assistant for platooning • Behaviour of other traffic • Willingness driver to be part of platoon
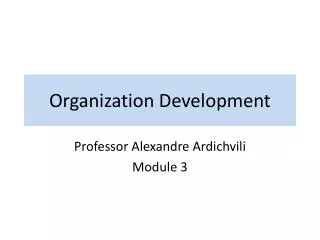
Case: 2-truck platoon • Evolution path: Single truck LHV (“1,5 truck, fixed”) 2-truck platoon multiple truck platoon mixed platoon • NBT after LHV (LHV 10-15% lower costs; but acceptance in Europe limited) • Why 2TP • more flexible than LHV in international use (decouple at border) • One truck unmanned: save driver time (share cabin) or… • …save driver if transports door2door by same carrier • Platooning technology is there, but • Platoon preferably to be kept constant in traffic, thus… • …early formation and late brake up needed • Relatively easily organized within-company • (self-organizing) formation support needed for public system port border LHV Uniform platoon Mixed platoon
4. Travel prediction/responsiveness Problem: • Need for reliable, customised and predictive travel time • Need for more responsiveness in case of irregular situations Solutions: dynamic truck route planning linked to customized travel prediction and state analysis. Prerequisites: • Tool adapted to different transport types of users (LogiKate for logistic companies and truck drivers) • Platform for handling information flows on traffic data • Customised advice depending on profiles • Data on OD’s, travel planning, characteristics, irregular situations
5. Terminal/road capacity management Problem: • Asset availability not known at system level • Asset utilisation not optimal, not evenly distributed • Lack of reliability queuing, loading and arrival time prediction Solutions: automated and dynamic matching of individual planning, booking and capacity. Example: PAT (inland wways, but applicable to trucks as well). Prerequisites: • Auction platform for agents • Agreed upon rules • Mechanism for sharing and integrating data from different agents • High penetration rate • Trust from stakeholders (trusted 3rd party)
Follow-up activities Investigate opportunities for co-financing project for Smart truck parking Specific efforts on self-organization in living labs: • Travel prediction/responsiveness system • terminal capacity management in smart corridor and when making ‘apps for the port’ • freight in new sensor city demonstration Develop platoon formation within CS roadmap: new technology, longer term
Conclusions Critical success factors • Decentralized decision making • Scalable approach • Pave the road for using smart agents/automation • Information sharing • Via trusted 3rdparty (human or bot), parties dare to share information • Interface that does not require too much competitive information • Deployment • Current roadmaps fragmented • Thinking not based on SO ideas • Poor investment capability • Stepwise approach needed • Merger of Co-operative driving and Logistics systems is near • Search for decentralized solutions level, not centralized ones • Self-organization requires specific architecture and apps Five promising technologies • Urban area traffic optimization • Smart truck parking • Platoon formation • Travel prediction/responsiveness • Terminal/road capacity management