Cost-Effective 3D Reconstruction Using Stereo and Projector Techniques for Art Preservation
Our innovative system implements a low-cost projector and stereo camera setup to achieve true-scale volumetric 3D reconstruction of artifacts with intricate textures and shapes. Utilizing a camera flash for illumination, our method captures images from multiple views and employs automatic mesh alignment and refinement through iterative algorithms. Tested on various surfaces including ceramics and metal, it showcases promising results for the cultural artifact preservation domain. This setup is designed to be simple to construct, operate, and reproduce, allowing easy collaboration with art and history institutions.

Cost-Effective 3D Reconstruction Using Stereo and Projector Techniques for Art Preservation
E N D
Presentation Transcript
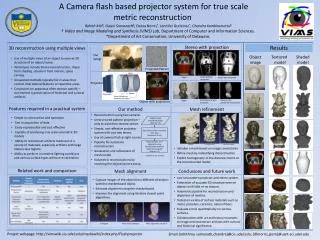
Related work and comparison Features required in a practical system Conclusions and future work Mesh alignment Mesh refinement Our method Stereo with projection 3D reconstruction using multiple views A Camera flash based projector system for true scale metric reconstruction • Reconstruction using two cameras • Unstructured pattern projection – only to aid stereo reconstruction • Simple, cost-effective projector system with just two lenses • Use of camera flash as light source • Pipeline for automatic reconstruction • Generation and refinement of mesh model • Volumetric reconstructions by revolving the object/camera setup • Low cost pattern projector and stereo system. • Estimation of accurate 3D structure even on objects with little or no texture. • Automatic pipeline for reconstruction and alignment of meshes. • Tested on variety of surface materials such as metal, porcelain, ceramics, natural fibers. • Evaluate errors quantitatively on various surfaces. • Collaborations with art and history museums to image and reconstruct artifacts with cultural and historical significance. Our Setup • Capture images of the object from different directions with the checkerboard object. • Estimate alignment using the checkerboard. • Improve the alignment using iterative closest point algorithms. • Simple in construction and operation • Fast in acquisition of data • Easily reproducible and cost effective • Capable of producing true scale volumetric 3D models • Ability to reconstruct artifacts made out of a variety of materials, especially artifacts with large texture-less regions. • Ability to perform in ambient lighting conditions and various surface types without re-calibration • Use of multiple views of an object to recover 3D structure of an object/scene. • Techniques include Stereo reconstruction, shape from shading, structure from motion, space carving. • Unassisted methods typically fail in areas that contain little texture/features or repetitive areas. • Constraints on apparatus often domain specific – our interest is preservation of historical and cultural artifacts. Capture views around the object (Section 3.3) Rohith MV§, Gowri Somanath§, Debra Norris*, Jennifer Gutierrez*, Chandra Kambhamettu§ § Video and Image Modeling and Synthesis (VIMS) Lab, Department of Computer and Information Sciences. *Department of Art Conservation, University of Delaware. Projected Pattern Stereo without projection Object Stereo with projection Reconstruct, filter and refine each view (Sections 3.4-3.6) Projector Object Initial mesh Refined mesh • Initialize a mesh based on image connectivity • Refine mesh by indentifying discontinuities • Exploit homogeneity of the distance metric on the reconstructed model Results Automatic pair wise alignment using Checkerboard and final alignment using ICP (Section 3.7) Outline of our scheme Unaligned After initial estimate After alignment using ICP Object image Textured model Shaded model Initial Disparity with projection Disparity after grid based interpolation Object Object with projection Project webpage: http://vimswiki.cis.udel.edu/mediawiki/index.php/Flashprojector Email:{rohithmv, somanath,chandra}@cis.udel.edu; {dhnorris,jaem}@uart-sci.udel.edu