Linear Motors
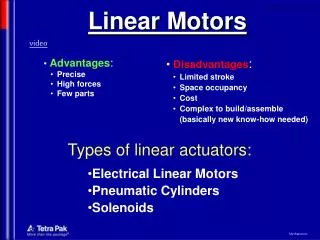
Motori Lineari. Linear Motors. video. Disadvantages : Limited stroke Space occupancy Cost Complex to build/assemble (basically new know-how needed). Advantages : Precise High forces Few parts. Types of linear actuators: Electrical Linear Motors Pneumatic Cylinders Solenoids.

Linear Motors
E N D
Presentation Transcript
Motori Lineari Linear Motors video • Disadvantages: • Limited stroke • Space occupancy • Cost • Complex to build/assemble • (basically new know-how needed) • Advantages: • Precise • High forces • Few parts • Types of linear actuators: • Electrical Linear Motors • Pneumatic Cylinders • Solenoids
Motori Lineari Linear Electric Motors • Advantages: • Performances • Compact • IP65-67 animazione1animazione2 • Disadvantages: • Cost • Limited Stroke • Complex Assembly and New Know How
Motori Lineari Pneumatic Cylinders • Advantages: • Force • Cost • Disadvantages: • Low Accuracy, Repeatability • Limited Stroke • “Air supply” issue
Motori Lineari Solenoids • Advantages: • Cost • Compact • High Speed • Disadvantages: • Very low accuracy, repeatability (bang-bang)
Motori Lineari Linear Motors: Performances & Costs Cost, Performance Belt Ball Screw Motor The best when concerning kinematics animazione The best when concerning force The best when concerning cost, The worst when concerning accuracy
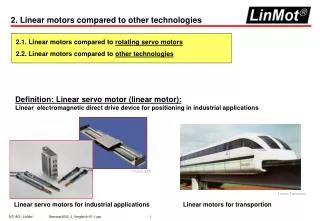
Motori Lineari Differences with respect to rotary motors (1) • Suppliers of linear motors • sell force [N]. • Suppliers of linear encoders • sell accuracy [mm and bandwidth: Hz]. • Then it’s necessary to assemble it, • put a case, maybe a brake, etc..
Motori Lineari Differences with respect to rotary motors (2) • In a linear motor only the windings that are close to the slider works, then, with respect to a rotary motor, with the same weight, the avilable force is lower. • In other words, while in a rotary motor all the windings and permanent magnets work, in the linear one is not the case. • The rod-like motors reduce the problem, but they don’t eliminate it. • Avilable forces: 5-8N/cm2 of gap.
Motori Lineari Which applications do fail? • If the machine is limited by mechanical resonances, insufficient stiffness, the linear motor will not provide any improvement. • If the control system is not fast enough, it will be the bottle neck and the full machine will not have desired performences. • If the deisred stiffness is high and the bandwidth limited, the gearbox is the only solution. • If the accuracy offered by the position sensor is not needed, then the linear motor is an expensive solution.
Motori Lineari The competitive solution: positioningX cartesian axis L=2000 mm, 50 kg load, pinion/rack or linear motor? • Motor cost 5 Nm = 100 • Gearbox cost = 150 • Encoder in the motor =30 • Rack and pinion =120 • Alignments, mounting procedure =100 • Result: 2 m/sec, 1g, • settling time ~ 100 msec, accuracy ~0.1 mm • Total cost = 500 • Motor cost 400/1000 N = 300 • Magnetic encoder cost = 50 • Alignments, • mounting procedure = 50 • Result : 4 m/sec, 2g, • settling time=20 msec, • accuracy 0.02 mm • Total cost = 400 • And each year the linear motors cost decrease…
Different Types of Linear Motors: Iron-Core
Different Types of Linear Motors: Air-Core Or Epoxy-Core
Different Types of Linear Motors: Slot-less
Tubolar Linear Motors: • Symmetrical Design • Compact cross section, similar to ball screw • 1mm nominal anular airgap (Non-critical gap for easy installation) • Enclosed Magnets & Coils • Not easily damaged • Force transferred directly to load • High mechanical stiffness • Integral Heat Sink Fins (No added cooling required) Copley (PullTab) Thrust Tube
Sensor-less linear motors • They replace the normal external position encoder (normally up to half the total cost of the complete motor) with integral Hall position sensing • Accuracy is, of course, worse tha encoder-equipped motors: 0.1 - 0.25mm typical LinMot Rod-like motor (link)
LinMot SW Tool C=ki; I=(V-kw)/R
Motori Coppia Torque Motors • Torque Motors (Motori Coppia) are just motors providing huge torques, generally with a very high pole pairs number and in direct-drive application with very low speed • How to go beyond the torque/dimensions limit today reached by the permanent magnets brushless motors? • Conventional Motor: windings on several slots, inserted in the slot in chaotic way. • Epicyclical Motor: each teeth has one-and-only-one winding around it, very short motor length
Motori Coppia Epicyclical Motors (Motori Epiciclici)
Motori Coppia Existing Technologies • Single teeths, micro-impressed, • wind-up and laser soldered • Layered winding on the teeth • Wounded teeths are joined and re-soldered • All connections are done outside • Complex process. High cogging. Low teeth number. • Star-shaped stator (open toward the external side) done with metal sheets, cut and pasted • Complex process. Low cogging. • Conventional Stator, windings inserted in the slot • Complex (often manual) operation • Not efficient slot filling • Used in big-diamater motors. High cogging.
Direct-Drive Torque Motors Motori Coppia • With brushless PM technology, high number of poles, low speed, they provide high performances if integrated in the machine • From 10 to 37000 Nm • From 85 to 570 mm diameter