Download
1 / 6
90 likes | 133 Views
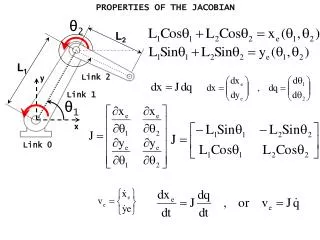
Ryan Keedy 5 / 23 / 2012. Jacobian Implementation. From Spong. Jacobian is the matrix that transforms degrees of freedom rates of change into end effecter rates of change Tracks velocity AND orientation Always 6 rows big, DOF columns wide

E N D
Ryan Keedy 5 / 23 / 2012 Jacobian Implementation
From Spong • Jacobian is the matrix that transforms degrees of freedom rates of change into end effecter rates of change • Tracks velocity AND orientation • Always 6 rows big, DOF columns wide • Upper 3 rows keep track of translation, lower three rows take care of orientation
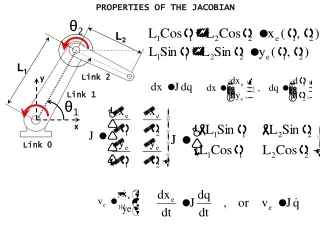
From Spong • Lower 3 rows: • In a rotation only, 2-D situation like ours, columns are simply each DOF’s local rotation matrix dotted with (0,0,1) • Upper 3 rows: • Take the previous vectors and cross them with a vector running along the entirely of each joint length
Determining Joint Angles • The non-square matrix can obviously not be inverted to find the joint angle velocities • Multiplying by the transpose yields a singular, non-invertible matrix • Turn to damped least squared paper: • Solve for J* = (JTW1J + W2)-1 JTW1 • Angular velocities are simply J* times x’
Considerations • Because of the W matrices, result is not exactly what you want • I’ve applied it incrementally, recalculating the desired translational velocity after each movement • W2 can be manipulated to alter the overall behavior/strategy of the arm
Conclusions • Not as precise as the inverse kinematics solution • Not sure how to integrate into planning • Based on W matrices, arm has a “mind of its own” • Solutions are “unique”