Download
1 / 18
180 likes | 201 Views
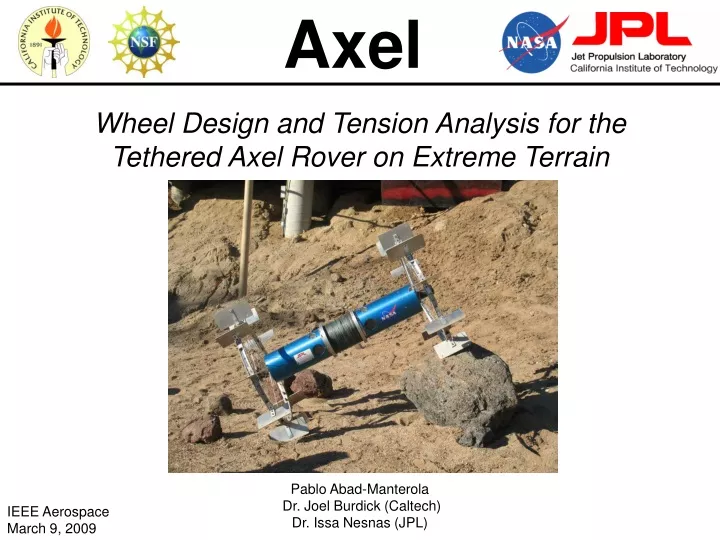
Axel. Wheel Design and Tension Analysis for the Tethered Axel Rover on Extreme Terrain. Pablo Abad-Manterola Dr. Joel Burdick (Caltech) Dr. Issa Nesnas (JPL). IEEE Aerospace March 9, 2009. Motivation. Unnamed crater in Centauri Montes region on Mars. Motivation.

E N D
Axel Wheel Design and Tension Analysis for the Tethered Axel Rover on Extreme Terrain Pablo Abad-Manterola Dr. Joel Burdick (Caltech) Dr. Issa Nesnas (JPL) IEEE Aerospace March 9, 2009
Motivation Unnamed crater in Centauri Montes region on Mars
Motivation Older light-toned deposit New gully deposit Unnamed crater in Terra Sirenum region on Mars
Motivation Cape St. Vincent, Victoria Crater, Mars False Color Image Taken by the Opportunity Rover
System • Original 1999 Concept • Minimally actuated rover • Separate mobility elements from • payload elements • Current Configuration • Body itself is the winch • Simple and robust: only 3 actuators • Sampling device mounted on arm
System • Processing • PC/104 Main Processor (700 MHz, 128 MB RAM) • Flash Memory (Disk-on-Chip) 704 MB • 2 GB IDE Solid State Drive • Caster Link • Caster Link Motor (24V, 150W) • Gearbox (74:1) • 500 Count Encoder • Drive System • Servodisc Drive Motor (30V, 153W) • Harmonic Drive • PC/104 Motor Controller • 500 Count Encoder • Power • 24V Lithium Polymer Battery • PC/104 DC/DC Converter • Vision • Dragonfly Firewire Cameras • PC/104 Firewire Board
Experiments Smithsonian Folklife Festival NASA: 50 Years Celebration Washington, DC June 25 – July 6, 2008
Experiments Smithsonian Folklife Festival NASA: 50 Years Celebration Washington, DC June 25 – July 6, 2008
Wheels Design Aluminum rim with golf cleat spikes Snow mountain bike tires Aluminum paddles on plastic frame
Wheels Design No-slip: and for
Wheels Design No-Slip Slip No-Slip Slip
Wheels Experiments • Mountain Bike Tires • Performance decrease from original • spiked wheels • Tests carried out at high, medium, • and low inflation • Paddle-wheels • Climbed over rocks ~70% wheel diameter • Surpassed a 12” step-obstacle • Ascended a 30° slope untethered
Tether Analysis
Tether Analysis
Tether Analysis
Recent Experiments January 14th Demo for Sponsors
Conclusion Acknowledgements Advisors Dr. Joel Burdick Dr. Issa Nesnas Dr. Srikanth Saripalli Graduate Students Jeff Edlund Undergraduates Johanna Cecava Nam Nguyen Kevin Noertker Tom Oliver Chun-Che Peng