Download
1 / 102
1.04k likes | 1.24k Views
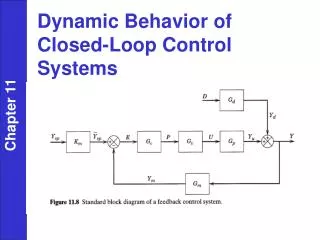
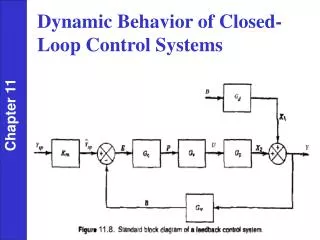
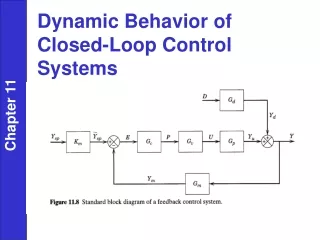
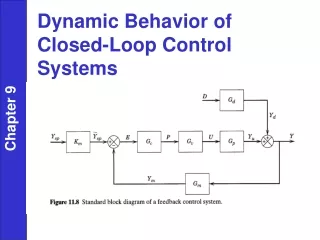
Dynamic Behavior and Stability of Closed-Loop Control Systems. Block diagram for process dynamics. Block diagram for sensor and transmitter. Block diagram for controller. Gain of I/P transmitter. Block diagram for control valve. Closed-Loop transfer functions. Proportional Control:.

E N D
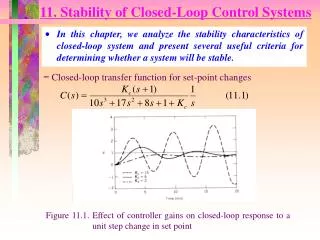
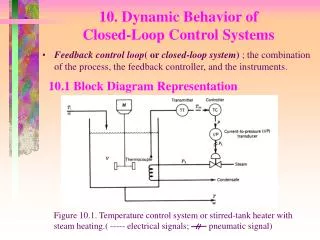
Dynamic Behavior and Stability of Closed-Loop Control Systems
Simulation with Matlab L y + + + - R
Effect of P- control K=5 K=2 K=1
Effect of P- control K=3 K=2 K=1 K=0.5
Effects of P-mode on control performance • Speed up the response; • Result in offset; • Offset decreases when loop gain increases; • Oscillatory response due to existence of process dead time.
Responses of PI control for integration process
L y + + + - R
Effect of K under constant I mode K=2 K=1 K=0.2
K=2.0 K=1.0 Effect of K under constant I mode K=0.2
Effects of I-mode on control performance • Eliminate steady state offset; • Speed up response along with increasing proportional constant or decreasing the integral time; • Has dynamic characteristics range from over damped to under damped.
Effect of D mode on controller output Contributed by derivative mode CO Time
Effect of D-mode P+D P
K=1.5 K=1 Effect of K under constant D-mode
Effects of D-mode on control performance • Provides an initial momentum to the process at the moment when input change occurs; • Results in heavier damped dynamics; • Has no direct effect on reducing the offset, nevertheless, offset reducing is usually achieved indirectly due to this D-mode; • Derivative mode will amplify the effect of noises.
PI PID P
Uses of P, I, D, modes in process control loops • Level control loops • Flow control loops • Pressure control loops • Temperature control loops
Level control loops • Tight control at constant height --- constant head for steady process flow, --- protection of centrifugal pumps, --- to provide precise heat transfer rate in an evaporator, --- to guarantee product quality, (e.g. precise sizing in warp yarn coating), --- etc.
Level control loops • Averaging level control --- to provide storage inventory. --- to absorb disturbances from an upstream units
Level control • Proportional controller with a wide band is sufficient for most averaging control; • Tight control is usually accomplished with a narrow proportional band; • For constraints or safety such as override or high/low signal selection, a very narrow band of proportional control is used.