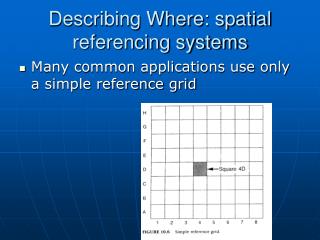
Spatial Referencing
500 likes | 750 Views
Spatial Referencing. Eng. Osama Dawoud. Spatial Referencing. We know we are somewhere there! but how can we know where we are?. We are here!!!. Spatial Referencing. For that We need a reference. Earth’s Size and Shape…. It was someday when people thought earth is flat!!.

Spatial Referencing
E N D
Presentation Transcript
Spatial Referencing Eng. Osama Dawoud
Spatial Referencing We know we are somewhere there! but how can we know where we are?
Spatial Referencing For that We need a reference
Earth’s Size and Shape… It was someday when people thought earth is flat!!
Earth’s Size and Shape… • The pear-shaped earth was introduced in view of the gravitational influence on the surface • And lastly, the potato-shaped earth was introduced to consider the uneven distribution of masses on the surface of the earth
Spatial Reference System (SRS) A reference coordinate system is a coordinate system with well-defined origin and orientation of the three orthogonal, coordinate axes. A spatial reference system is a mathematical abstraction. It is realized (or materialized) by means of a Spatial Reference Frame (SRF).
Spatial Reference Frame (SRF) SRF as a catalogue of coordinates of specific, identifiable point objects, which implicitly materialize the coordinate axes of the SRS.
International Terrestrial Reference System (ITRS) Several spatial reference systems are used in the Earth sciences. The most important one for the GIS community is the International Terrestrial Reference System (ITRS). The ITRS has its origin in the centre of mass of the Earth. The Z-axis points towards a mean Earth north pole. The X-axis is oriented towards a mean Greenwich meridian and is orthogonal to the Z-axis. The Y -axis completes the right-handed reference coordinate system
International Terrestrial Reference Frame(ITRF) The ITRS is realized through the International Terrestrial Reference Frame (ITRF), a catalogue of estimated coordinates (and velocities) at a particular epoch of several specific, identifiable points (or stations). These stations are more or less homogeneously distributed over the Earth surface. They can be thought of as defining the vertices of a fundamental polyhedron, a geometric abstraction of the Earth’s shape at the fundamental epoch
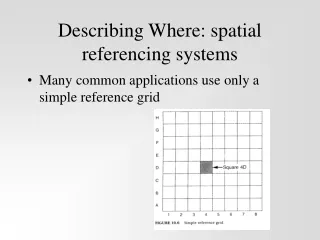
GIS user may encounter the following items in the map legend: • the name of the local vertical datum • the name of the local horizontal datum • the name of the reference ellipsoid and the fundamental point • the type of coordinates associated with the map grid lines • the map projection • the map scale • the transformation parameters from a global datum to the local horizontal datum.
The geoid level surface that most closely approximates all the Earth’s oceans Every point on the geoid has the same zero height all over the world.
The local vertical Datum Historically, the geoid has been realized only locally, not globally. A local mean sea level surface is adopted as the zero height surface of the locality. The local vertical datum is implemented through a leveling network. A leveling network consists of benchmarks, whose height above mean sea level has been determined through geodetic leveling.
The ellipsoid and the horizontal datum Can we also use the mean sea level surface to project upon it the rugged Earth topography? In principle yes, but in practice no. The mean sea level is everywhere orthogonal to the direction of the gravity vector. A surface that must satisfy this condition is bumpy and complex to describe mathematically. The mathematical shape that is simple enough and most closely approximates the local mean sea level is the surface of an oblate ellipsoid.
Coordinate Systems and Reference Model A reference system is then needed to be “put-on” a model that closely fits the surface of the earth. • In geometric geodesy, the earth is represented by an ellipsoid of revolution whose dimensions fits closely the surface of the earth. • This ellipsoid of revolution is known as the reference ellipsoid (other older literature termed this as “spheroid”). • The coordinate system and the reference system are the essential components of a reference framework.
Introduction Geographic Coordinate Systems Angle from equator: latitude Φ Angle east of Greenwich: longitude λ
Projected Coordinate Systems X and Y from a specified origin
Need for Projection!! Earth is ellipsoidal while maps are planner
Introduction Limitations on Projection Systems
Introduction cylinder plane cone Different Projection Systems normal transverse oblique
Local Projected Coordinates http://gaialab.asu.edu/Jordan/Reproject.php
Local Projected Coordinates Palestine Grid
Local Projected Coordinates Israel Grid
Coordinate Systems • In studying Geometric Geodesy, three coordinate systems are commonly in use: • The Cartesian-Space Rectangular Coordinate System • The Geodetic Coordinate System • The Map-Grid Coordinate System
Cartesian-Space Rectangular Coordinate System a rectilinear type of coordinate system on a three-dimensional surface where the position of the points is expressed as coordinates of a righthanded orthogonal system whose origin coincides with the center of the ellipsoid, XZ-plane defines the zero meridian and XY plane defines the equator Uses (X,Y,Z) as its coordinate components
Geodetic Coordinate System (Geographic Coordinate System) a curvilinear type of coordinate system on three-dimensional space which uses a an surface to define the position of point on the earth. This coordinate system also uses three parameters to define the position of a point: 1. Geodetic latitude (φ): the angle between the ellipsoid normal through the point and the equator. (0≤ φ ≤ 90N or S) 2. Geodetic Longitude (λ): the angle in the equatorial plane between the zero meridian and the meridian of the point. (0 ≤ λ ≤180E or W) 3. Ellipsoidal height (h): the distance along the normal from the surface of the ellipsoid to point P.
Map-Grid Coordinate System (Projected Coordinate system) A rectilinear type of coordinate system on a planar surface where the horizontal position of a point is defined. The idea of which is to make the curved surface of the Earth by some mathematical transformation (map projection) into a plane. It uses basically two parameters to define the position of a point: Northing, N (or y) Easting, E (or x) • The third component of the position of a point which is the Elevation becomes an attribute in this coordinate system