Huber-MAP Reconstruction for Super-Resolution with Registration Integration
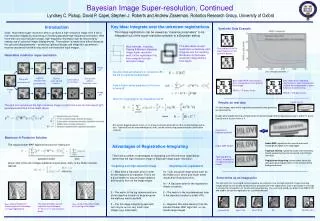
This study presents a Huber-MAP approach for multi-frame super-resolution, integrating registration uncertainties to enhance image reconstruction. By leveraging low-resolution image sets and accounting for both geometrical and photometric registration parameters, the method delivers high-quality results with improved edge definition and detail. The proposed technique outperforms traditional Gaussian prior methods, yielding reduced Root Mean Square Error (RMSE) values while effectively handling challenges posed by noise and illumination variations. Results demonstrate the significant potential of Huber-MAP in advancing image processing applications.

Huber-MAP Reconstruction for Super-Resolution with Registration Integration
E N D
Presentation Transcript
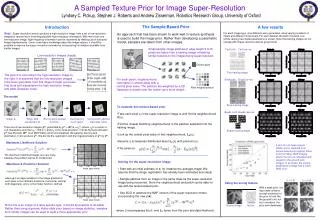
Best Huber-MAP reconstruction. Error compared to known ground truth image. RMSE = 15.5 grey levels. Best registration-integrating reconstruction. Note improvement of black-white edge detail in some letters on the bottom line. RMSE = 14.8 grey levels. image y(1) Lighting changes with parameters λ. Blur by point-spread function. Corrupt with additive Gaussian noise. Warp with parameters . Decimate by zoom factor. Image x. image y(K) Inputs 1 & 10 xMAP using a Huber prior, assuming perfect knowledge of image registrations. The same problem, but with registrations perturbed by δ ~ N ( 0, 0.12 ) low-resolution pixels. xMAPusing a Gaussian image prior, giving softer edges. Input 16/16 ML1 ML2 abs(ML1-ML2 ) ground truth Input 1/16 Bayesian Image Super-resolution, Continued Lyndsey C. Pickup, David P. Capel, Stephen J. Roberts and Andrew Zisserman, Robotics Research Group, University of Oxford Introduction Key Idea: Integrate over the unknown registrations Synthetic Data Example The image registrations can be viewed as “nuisance parameters” to be integrated out of the super-resolution problem in a Bayesian setting. Goal: Multi-frame super-resolution aims to produce a high-resolution image from a set of low-resolution images by recovering or inventing plausible high-frequency information. With more than one low-resolution image, high-frequency information can be recovered by making use of sub-pixel image displacements. The problem is made more difficult because the sub-pixel displacements -- as well as lighting changes and image blur parameters -- must be recovered from this noisy set of low-resolution input images. This alternative: accept registration uncertainty, and integrate over the resulting distribution to find super-resolution image directly from inputs. Most methods, including Tipping & Bishop’s Bayesian Image Super-resolution work, fix the registration first, then compute the high-resolution image. First and last of the 16 input images from the synthetic dataset. Generative model for super-resolution Assume small perturbations or corrections δ in the set of registration parameters: Take a Taylor series expansion of the error in terms δ: Now find –log(p(x|{y(k)})) by integrating over δ: Results on real data The goal is to reconstruct the high-resolution image x (right) from a set of noise inputs {y(k)} generated according to the model above. 10 input images, each with 4 registration parameters (two geometric, two photometric). Images were registered using a simple iterative intensity-based method, typically accurate to within 0.1 pixels. Outputs are at a zoom factor of 4. where H is a block diagonal sparse matrix, so for many covariance assumptions, S is correspondingly sparse also. Typically C can be assumed diagonal, and L can be solved using gradient descent optimization methods. Registration-Integrating (detail) Maximum A Posteriori Solution Huber-MAP: regularizes the smooth areas well, though gives slightly over-crisp edges. Tipping & Bishop: typical Gaussian over-smoothing, though weakening the prior would risk over-fitting to the noise. Registration-integrating: shows letters clearly but also gives good regularization on the constant white background areas. The regular Huber-MAP objective function for finding x is where G(x) is the set of image gradients at each pixel, and is the Huber function, defined: Huber-MAP (detail) Advantages of Registration-Integrating There are a number of advantages to integrating over the unknown registrations rather than the high-resolution image in Bayesian image super-resolution: Tipping & Bishop (detail), extended to include photometric model. Integrating over high-resolution image 1 – Must have a Gaussian prior in order for the integral to be tractable. This is not a good model for natural image statistics and tends to blur out the image edges. 2 – The matrix in the log-determinant term of the objective function is large because the matrices tend to be NxN. 3 – The full image-integrating approach can only be run on very small input images (e.g. 9x9 pixels). Integrating over registrations 1a – Can use good image priors such as the Huber prior, which give much better results than Gaussian priors. 1b – A Gaussian prior for the registration offsets is realistic. 2 – The matrix in the log-determinant term of the objective function is small (4*K). 3 – Requires little more memory than the standard Huber-MAP algorithm, so can handle large images. Extra terms as an image prior The two terms of L involving S can be viewed as an extra prior over the high-resolution image, favouring images which are not acutely sensitive to tiny perturbations in the registrations. Such a perturbation is enough to change the noise pattern on the ML estimate drastically. Two vectors δ1 and δ2are drawn from N(0,I*0.042) and used to corrupt the registration on a synthetic dataset.