Download
1 / 32
350 likes | 545 Views
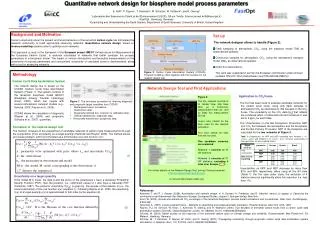
Identification of Industrial Robot Parameters for Advanced Model-Based Controllers Design Basilio BONA and Aldo CURATELLA Dipartimento di Automatica e Informatica Politecnico di Torino, Italy basilio.bona@polito.it. Contents. 0. Introduction Robot model and parameters

E N D
Identification of Industrial Robot Parameters for Advanced Model-Based Controllers Design Basilio BONA and Aldo CURATELLA Dipartimento di Automatica e Informatica Politecnico di Torino, Italy basilio.bona@polito.it Basilio Bona – DAUIN – Politecnico di Torino
Contents 0 • Introduction • Robot model and parameters • Closed-loop parameter identification • Test case • Identification results • Robot model • Gravity compensation • Friction identification • Parameter estimation • Validation • Controller design • Conclusions and further developments Basilio Bona – DAUIN – Politecnico di Torino
1 Introduction • Estimation of the model parameters of a COMAU Smart S2 industrial robot for controller design purposes. • Challenges • controller in-the-loop • no sensors to measure joint velocities • Suitable trajectories were generated to avoid the excitation of unmodelled plant dynamics • The method is applied to a 6 DoF industrial robot, estimating its parameters to design an improved model-based controller Basilio Bona – DAUIN – Politecnico di Torino
Robot Model and Parameters 2.1 Assumptions • rigid links and joints, i.e. no elastic potential energy storage elements; • ideal joint gearboxes are ideal, 100% efficient, no dead bands, • friction is modelled as the sum of viscous and Coulomb friction only, no stiction is considered. Basilio Bona – DAUIN – Politecnico di Torino
Robot Model and Parameters 2.2 Friction torques Lagrange equation where and friction torque is Basilio Bona – DAUIN – Politecnico di Torino
Robot Model and Parameters 2.3 Friction parameters Base (identificable) parameters A subset of inertial parameters k-th link inertial parameters Regressor model where k-th link friction parameters Basilio Bona – DAUIN – Politecnico di Torino
Robot Model and Parameters 2.4 SISO closed-loop discrete-time system to be identified • The controller is often unknown Basilio Bona – DAUIN – Politecnico di Torino
Closed-loop Parameter Identification 3.1 Closed-loop Methods • Direct methods: no a-priori controller knowledge is necessary • Indirect methods: applicable only if the controller is known • Joint I/O methods: the controller is identified The Projection Method [Forssell 1999, Forssell & Ljung 2000] has been used (type 3) It estimates the controller influence on the output data to remove its effects Basilio Bona – DAUIN – Politecnico di Torino
Closed-loop Parameter Identification 3.2 Projection Method (PM) – phase 1 The sensitivity function is estimated using a non-causal FIR filter Basilio Bona – DAUIN – Politecnico di Torino
Closed-loop Parameter Identification 3.3 Projection Method (PM) – phase 2 The estimated sensitivity is used to compute chosen so large to avoid correlation between and which in turn is used to estimate from using an open-loop method where Basilio Bona – DAUIN – Politecnico di Torino
Closed-loop Parameter Identification 3.4 Maximum Likelihood Estimation (MLE) method was used to estimate from white gaussian noise assumed • MLE needs a properly exciting reference signal (trajectory) • measured data are joint positions and torques • joint velocities and accelerations are needed • friction (nonlinear effect) is to be considered • aliasing error is present • the observation time is finite Basilio Bona – DAUIN – Politecnico di Torino
Closed-loop Parameter Identification 3.5 The excitation trajectory is given by a Finite Fourier series the fundamental frequency and the number of harmonics define the signal band, that should avoid to excite parasitic (elastic) modes Basilio Bona – DAUIN – Politecnico di Torino
Test Case COMAU SMART-3 S2 Robot 4.1 Basilio Bona – DAUIN – Politecnico di Torino
Test Case COMAU SMART-3 S2 Robot 4.2 Facts • 6 revolute joints driven by 6 brushless motors • 6 gearboxes with different reduction rates • 1 force-torque sensor on tip (not used) • non-spherical wrist: no closed-form inverse kinematics exists • power drives are still the original ones, but … • the original control and supervision system has been replaced, and is now based on Linux RTAI real-time extension Basilio Bona – DAUIN – Politecnico di Torino
Test Case COMAU SMART-3 S2 Robot 4.3 Basilio Bona – DAUIN – Politecnico di Torino
Test Case COMAU SMART-3 S2 Robot 4.4 Basilio Bona – DAUIN – Politecnico di Torino
Test Case COMAU SMART-3 S2 Robot 4.5 • Sampling frequency is constrained to 1 kHz • Resonance frequency for shoulder links is 3 Hz ÷ 20 Hz • Resonance frequency for wrist links is 5 Hz ÷ 30 Hz • Constraints … • choice made … Basilio Bona – DAUIN – Politecnico di Torino
Identification Results 5.1 I – Robot Model • Simplified inertial model Basilio Bona – DAUIN – Politecnico di Torino
Identification Results 5.2 II – Gravity compensation (1) – Model • Axis 2 and 3 are those mainly affected by gravity, which appears as a sinusoidal torque • Two velocity ramps, one negative one positive, were used to minimize Coriolis and centripetal torques Basilio Bona – DAUIN – Politecnico di Torino
Identification Results 5.3 II – Gravity compensation (2) – Results Basilio Bona – DAUIN – Politecnico di Torino
Identification Results 5.4 III – Friction identification (1) – Model • Coulomb + viscous friction • Reference trajectory used • Coriolis and centripetal effects neglected position velocity acceleration Basilio Bona – DAUIN – Politecnico di Torino
Identification Results 5.5 III – Friction identification (2) – Results • compensated • uncompensated Axis 2 Basilio Bona – DAUIN – Politecnico di Torino
Identification Results 5.6 III – Friction identification (3) – Results Basilio Bona – DAUIN – Politecnico di Torino
Identification Results 5.7 IV – Parameter estimation (1) – Trajectory generation Degrees Axis 3 Basilio Bona – DAUIN – Politecnico di Torino
Identification Results 5.8 IV – Parameter estimation (2) – Optimization With this trajectory only 11 parameters are estimated for each joint The optimal parameters are solutions of an optimization problem where Max singular value min singular value Basilio Bona – DAUIN – Politecnico di Torino
Identification Results 5.9 IV – Parameter estimation (3) – Data filtering • Every observation was repeated 25 times • The data were filtered with a 8-th order Chebyshev low pass filter (cut-off freq. = 80 Hz) and resampled at 200 Hz • The estimated probability distribution of the measurement noise is Position noise gaussian & very small Torque noise gaussian & non-negligible Basilio Bona – DAUIN – Politecnico di Torino
Identification Results 5.10 IV – Parameter estimation (4) – Data filtering • Measured torque was adjusted for friction compensation Original measured torque Torque [Nm] Friction torque compensated and filtered used for identification Basilio Bona – DAUIN – Politecnico di Torino
Identification Results 5.11 IV – Parameter estimation (5) – final results Basilio Bona – DAUIN – Politecnico di Torino
Identification Results 5.12 V – Validation (1) • Position error (PDF) between simulated and measured data Basilio Bona – DAUIN – Politecnico di Torino
Identification Results 5.13 V – Validation (2) • Torque error (PDF) between simulated and measured data Basilio Bona – DAUIN – Politecnico di Torino
Controller Design 6.1 • Preliminary results on joint-6 controller • Controller tracking errors: Basilio Bona – DAUIN – Politecnico di Torino
Conclusions and Further Developments 7.1 • Identification of an industrial manipulator with its original controller • PM identification method • Exciting signal with suitable frequency band • Friction compensation and parameter estimation • Inertial parameter estimation • Error PDF validation • New controller design only for joint 6 • Extend controller design to other joints • Identification of elastic parameters? Basilio Bona – DAUIN – Politecnico di Torino