Download
1 / 11
110 likes | 236 Views
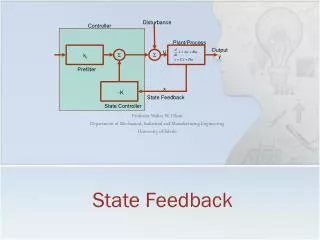
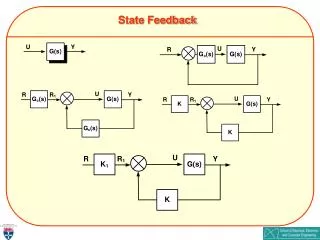
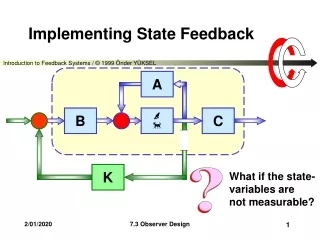
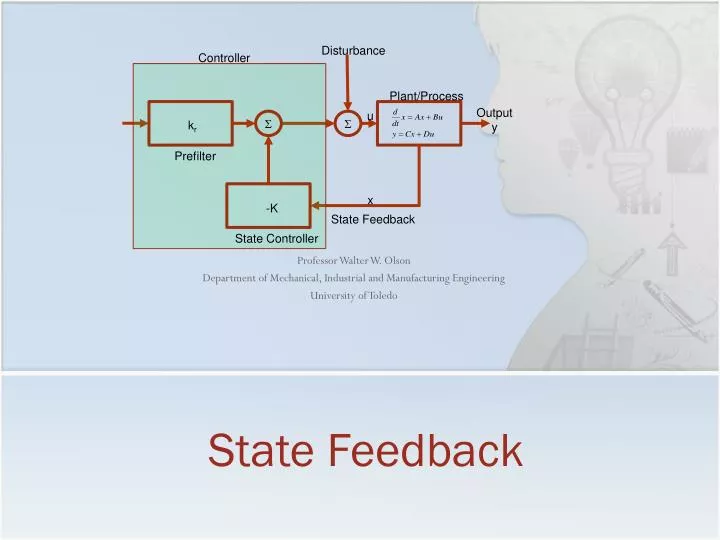
State Feedback. Disturbance. Controller. Plant/Process. Output y. u. S. S. Professor Walter W. Olson Department of Mechanical, Industrial and Manufacturing Engineering University of Toledo. k r. Prefilter. x. -K. State Feedback. State Controller. Exercise 1: Linearization.

E N D
State Feedback Disturbance Controller Plant/Process Output y u S S Professor Walter W. Olson Department of Mechanical, Industrial and Manufacturing Engineering University of Toledo kr Prefilter x -K State Feedback State Controller
Exercise 2: Steady State Value u x • Compute the steady state response for the system below subject to a step input: k m massless cart b
Exercise 2: Steady State Values >> sys = ss(A,B,C,D) a = x1 x2 x1 0 1 x2 -0.6667 -0.1333 b = u1 x1 0.1333 x2 0.6489 c = x1 x2 y1 1 0 d = u1 y1 0 Continuous-time state-space model. >> step(sys) • From Matlab: >> A=[0 1;-k/m -b/m] A = 0 1.0000 -0.6667 -0.1333 >> B=[b/m;k/m-(b/m)^2] B = 0.1333 0.6489 >> C=[1,0] C = 1 0 >> D=0 D = 0
Exercise 3: Reachability u x • Determine the Reachability of k m massless cart b
Exercise 4: State Feedback u x • Design a state feedback controller that will move the eigenvalues from to for the purpose of reducing the amount of oscillation of the mass. k m massless cart b