3D Elastography
Background. Liver cancer represents a significant source of morbidity and mortality in the United States and worldwide [1].Often times, cancer lesions appear to be isoechoic making it harder to differentiate from normal tissue.Frequent cause of failure in assessing the region of tissue destructio

3D Elastography
E N D
Presentation Transcript
1. 3D Elastography Harish Krishnaswamy, Parker Wilson
Mentor: Emad Boctor, Dr. Russell Taylor
2. Background Liver cancer represents a significant source of morbidity and mortality in the United States and worldwide [1].
Often times, cancer lesions appear to be isoechoic making it harder to differentiate from normal tissue.
Frequent cause of failure in assessing the region of tissue destruction often results in local failure or excessively loss of healthy liver tissue [2].
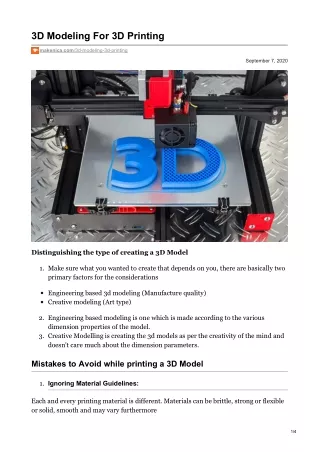
3. Motivation Radio-frequency Ablation (RFA) is emerging as an effective approach for treating liver tumors. Key problems problems include tumor localization and monitoring the progress of ablation.
B-Mode ultrasound (US) is the most popular method of targeting hepatic ablations, yet it lacks the ability to monitor the progress of tissue ablation.
4. Goals Real-time monitoring of tissue ablation and assessment of region of tissue destruction.
The use of 3D ultrasound imaging to track changes in tissue elasticity due to thermal ablation. [3]
Generating 3D Strain and 3D US at the same rate.
Design optimal robotic end-effector to provide ideal palpating scenario
5. 2D Strain Based Modeling Elasticity is a good parameter to differentiate various types of tissues. [7]
Depending on the rigidity of the tissue, the palpation will generate different strain fields.
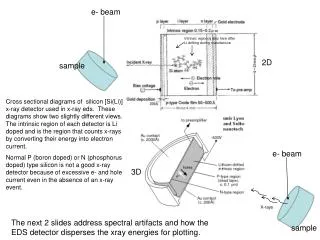
6. System Overview The overall robotic strain based imaging system (L) and schematic drawing of the robot�s end-effector holding the US probe (R). The large probe serves as a compression plate. [3]
9. Experimental Design The Phantom will be constructed in such a way that the scatter density will the be the same through out.
The concentration of the gel will vary between the soft gel background and the inclusion.
Data Collection Protocol:
Palpate and Move
Move with Incline Compression
Zig-Zag Compression Motion
10. Approach Implementing the Ophir�s and Lorenz�s Strain Algorithms.
Use correlation map as a weighing kernel for the successive 3D strain reconstruction.
11. Division Of Labor Project Manager: Harish Krishnaswamy
Designing Phantom and Implementation of Algorithm along with Parker W.
Parker Wilson:
Collection of Phantom Data Set in addition to implementing correlation as a method of determining 3D strain reconstruction along with Harish K.
12. Deliverables Minimum: Collecting the data and implementing the basic strain algorithms in MATLAB.
Expected: Make further analysis and write up a MICCAI paper.
Maximum: To move MATLAB implementation to C++ and test the free hand approach.
13. Timeline Mar 1 � Completion of data collection.
Mar 21 � Completion of MATLAB strain algorithm.
April 7 � Finish paper and analysis for submission to MICCAI.
April 21 � Implementation of Strain Algorithm in C++.
May 1 � Integration of the 3D Strain Ultra Sound.
14. Dependencies Materials for Phantom gel construction to be provided by Emad Boctor in CISST lab.
Time on ultrasound machine for data collection and testing.
Synchronization between tracker and Antares (Siemens).
Using LARS in comply mode.
15. Budget Materials and lab time covered under Dr. Taylor�s grant money.
16. References Nakakura EK, Choti MA: Management of hepatocellular carcinoma. Oncology (Huntingt). 2000 Jul;14(7):1085-98; discussion 1098-102. Review.
Buscarini L, Rossi S: Technology for radiofrequency thermal ablation of liver tu-mors.Semin Laparosc Surg 1997;4:96�101.
Emad M. Boctor, Gregory Fischer, Michael A. Choti, Gabor Fichtinger, Russell H. Taylor: A Dual-Armed Robotic System for Intraoperative Ultrasound Guided Hepatic Ablative Therapy:A Prospective Study. Accepted ICRA 2004.
Graham SJ, Stanisz GJ, Kecojevic A, Bronskill MJ, Henkelman RM: Analysis of changes in MRI properties of tissues after heat treatment. Magn Reson Med 1999;42(6):1061-71.
Wu T, Felmlee JP, Greenleaf JF, Riederer SJ, Ehman RL: Assessment of thermal tissue ablation with MR elastography. Magn Reson Med 2001 Jan;45(1):80-7.
Alexander F. Kolen, Jeffrey C. Bamber, Eltayeb E. Ahmed: Analysis of cardiovascular-induced liver motion for application to elasticity imaging of the liver in vivo. MIUA 2002.
Ophir J., C�spedes E.I., Ponnekanti H., Yazdi Y., Li X: Elastography: a quantitative method for imaging the elasticity of biological tissues. Ultrasonic Imag.,13:111�134, 1991
Lubinski M.A., Emelianov S.Y., O�Donnell M: Speckle tracking methods for ultrasonic elasticity imaging using short time correlation. IEEE Trans. Ultrason., Ferroelect., Freq., Contr., 46:82-96, 1999.
Pesavento A., Perrey C., Krueger M., Ermert H: A Time Efficient and Accurate Strain Es-timation Concept for Ultrasonic Elastography Using Iterative Phase Zero Estimation. IEEE Trans. Ultrason., Ferroelect., Freq., Contr., 46(5):1057-1067, 1999.
Alam S.K., Ophir J: Reduction of signal decorrelation from mechanical compression of tissues by temporal stretching: applications to elastography. US Med. Biol., 23:95�105, 1997.
Alam S.K., Ophir J., Konofagou E.E: An adaptive strain estimator for elastography. IEEE Trans. Ultrason. Ferroelec. Freq. Cont., 45:461�472, 1998.
Fahey BJ, Nightingale KR, Wolf P and Trahey GE: ARFI Imaging of Thermal Lesions in Ex Vivo and In Vivo Soft Tissues. Proceedings of the 2003 IEEE US Symposium. 2003.
Wen-Chun Yeh, Pai-Chi Li, Yung-Ming Jeng, Hey-Chi Hsu, Po-Ling Kuo, Meng-Lin Li, Pei-Ming Yang and Po Huang Lee: Elastic modulus measurements of human liver and correlation with pathology. US in Med. Biol. 28(4), 467-474, 2002.
M.M. Doyley, J.C. Bamber, P.M. Meany, F.G. Fuechsel, N.L. Bush, and N.R. Miller: Re-constructing Young�s modulus distributions within soft tissues from freehand elastograms. Acoustical Imaging, volume 25, pp 469-476 2000.
Taylor RH, Funda J, Eldridge B, Gruben K, LaRose D, Gomory S, Talamini M, Kavoussi LA, and Anderson JH: A Telerobotic Assistant for Laparoscopic Surgery. IEEE EMBS Magazine Special Issue on Robotics in Surgery. 1995. pp. 279-291
Moddemeijer, R., Delay-Estimation with Application to Electroencephalograms in Epi-lepsy (Phd-thesis), Universiteit Twente, 1989, Enschede (NL), ISBN: 90-9002668-1
Kallel, F., Stafford, R.J., Price, R. E., Righetti, R., Ophir, J. and Hazle, J.D.: The Feasibility of Elastographic Visualization of HIFU-Induced Thermal Lesions in Soft-Tissue. Ultras. Med. and Biol., Vol 25(4), pp.641-647, 1999.