Download
1 / 63

E N D
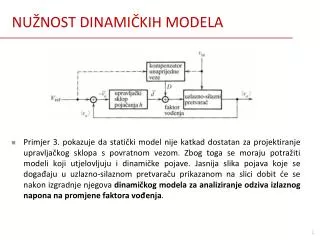
NUŽNOST DINAMIČKIH MODELA • Primjer 3. pokazuje da statički model nije katkad dostatan za projektiranje upravljačkog sklopa s povratnom vezom. Zbog toga se moraju potražiti modeli kojiutjelovljuju i dinamičke pojave. Jasnija slika pojava koje se događaju u uzlazno-silaznom pretvaraču prikazanom na slici dobit će se nakon izgradnje njegovadinamičkogmodela za analiziranje odziva izlaznog napona na promjene faktoravođenja.
IZGRADNJA DINAMIČKIH MODELAUSREDNJAVANJEM STRUJNOG KRUGA • Golema većina modela učinskih sklopova sastoji se samo od krugova s idealnimsklopkama i linearnim i vremenski nepromjenjivim (LVN) elementima. • Analizatakvih krugova za svako sklopno ili topološko stanje (topologiju sklopa predočuje linearni graf njegove električne mreže. Sklopno ili topološkostanje električne mreže određuje stanje sklopki (vođenje ili nevođenje) u pojedinim karakterističnim intervalima rada mreže.) jednostavna je, kao što je i jednostavna analiza LVN-kruga. • Za rješavanje bilo kojeg sklopnog stanja mogu se uporabitirazličite pogodne metode, primjerice impedancijske metode (Impedancijske metode temelje se na rješavanju diferencijalnih jednadžba strujnih krugovaLaplaceovom transformacijom). Problemi nastajupri spajanju rješenja uzastopnih sklopnih stanja, posebice ako su trenutci prijelazaiz jednoga sklopnog stanja u drugo ovisni o strujno-naponskim odnosima.
IZGRADNJA DINAMIČKIH MODELAUSREDNJAVANJEM STRUJNOG KRUGA • Pored tih trenutačnih modela za analiziranje sustava s povratnom vezom potrebnisu modeli koji opisuju dinamičko ponašanje upravljačkog sklopa zajedno s dinamičkim ponašanjem učinskog sklopa. No, metode modeliranja strujnih krugovačesto su neprikladne ili neprimjerene za modeliranje upravljačkih sklopova. Ti razloziupućuju na studij općenitijih modela, od kojih su najvažniji modeli u prostoru stanja. • Ipak, dinamičko ponašanje mnogih vrsta učinskih sklopova može se analiziratiuporabom usrednjenih modela. Time se ostaje na metodama analize strujnih krugova,na metodama koje su vrlo raširene među inženjerima elektrotehnike. Idejausrednjavanja strujnih krugova dovoljno je jednostavna za razvoj jezgrovitih, a ipakvrlo korisnih modela nekih važnijih porodica učinskih sklopova. • Usrednjeni modeli tradicijski su poglavito razvijeni za visokofrekvencijske istosmjernepretvarače; najčešće usrednjavanjem modela u prostoru stanja. Ovdje ćemose pak koristiti bazičnijim pristupom, pristupom koji polazi izravno od sheme učinskogsklopa i ima širu primjenu nego tradicijski pristup. Pokazat ćemo kako izgraditinelinearne krugove koji opisuju usrednjeno ponašanje različitih učinskih sklopovai kako izvesti pripadajuće linearne krugove koji približno opisuju njihovo ponašanje za male signale.
TRENUTAČNA SREDNJA VRIJEDNOST VARIJABLE • Kod mnogih sklopova učinske elektronike, ako je valovitost dovoljno mala, prvonas zanimaju srednje vrijednosti napona i struja, a tek onda njihove trenutačnevrijednosti. Tako je, kod uzlazno-silaznog pretvarača u prethodnim primjerima, ciljregulacije održavanje srednje vrijednosti izlaznog napona na nekoj određenoj vrijednosti,pod pretpostavkom male valovitosti izlaznog napona. • Kod istosmjernogaelektromotornog pogona napajanog iz usmjerivača u primjeru2 jedini je cilj regulacijeupravljanje srednjom vrijednošću istosmjerne struje armature motora;naime, zbog velikih vremenskih konstanti mehaničkih dijelova sustava, pulzacijestruje oko srednje vrijednosti imaju minorne učinke na vrtnju motora. • Nešto profinjeniji primjer daje tipični visokofrekvencijski izmjenjivač s modulacijomširine impulsa za izmjenične elektromotorne pogone, prisjetimo se visokofrekvencijskog istosmjernog pretvarača u mosnom spoju. U tom je slučaju cilj regulacije održavanje trenutačnesrednje vrijednosti izlazne struje oko sinusne reference. Frekvencija sinusne referencemnogo je manja od sklopne frekvencije. Pretpostavlja se da je valovitost strujeoko sinusne reference mala.
TRENUTAČNA SREDNJA VRIJEDNOST VARIJABLE • Primjeri poput ovih navode nas na postavljanje uvjeta na trenutačne srednjevrijednosti varijabla kruga. Naš je cilj pronaći takav pristup analizi strujnih krugovakoji omogućuje analizu trenutačnih srednjih vrijednosti varijabla strujnog kruga;čak i tijekom prijelaznih, neperiodičkih, stanja. • Uvodi se sljedeća definicija trenutačne srednje vrijednosti varijable: Interval T, u kojem se računa srednja vrijednost, konstantnog je trajanja. (Potpunijisimbol bio bi primjerice x–T(t), no budući da je iz surječja jasno značenje T, ne treba gomilati oznake.) Ta se trenutačna srednja vrijednost u svakom trenutku računa zaprotekli interval trajanja T. Zato je vremenska funkcija x–(t) glađa od funkcije x(t).Usto je i neprekinuta funkcija, čak i ako x(t) sadrži impulse.
TRENUTAČNA SREDNJA VRIJEDNOST VARIJABLE • Važna je posljedica izraza definicije: derivacija trenutačne srednje vrijednosti varijable jednaka je trenutačnoj srednjojvrijednosti njezine derivacije; to se može jednostavno provjeriti. • Potrebno je odabrati prikladni interval usrednjavanja T. Da bi se dobili upotrebivirezultati, za svaku određenu primjenu odabire se T. Gotovo se uvijek za T odabirenajkraći regularni sklopni interval učinskog sklopa. U posebnom slučaju, ako jex(t) periodična funkcija, odabire se T jednak periodi; tada je x–(t) upravo uobičajenasrednja vrijednost veličine – konstanta koju smo označivali s XAV (odnosno ),. ) • Taj je poseban slučaj, naravno, vrlo važan za učinsku elektroniku jer su u tipičnim učinskim sklopovimavalni oblici u ustaljenom stanju doista periodični.
USREDNJAVANJE STRUJNOG KRUGA • Treba poći od uvjetnih jednadžba na trenutačne vrijednosti varijabla strujnogkruga; to su Kirchhoffov zakon napona (KZN) i struje (KZS). • Usrednjavanjem tihuvjetnih jednadžba proizlazi da identične uvjetne jednadžbe vrijede za trenutačnesrednje vrijednosti varijabla. Razlog je u tome što su Kirchhoffove uvjetne jednadžbe na trenutačne vrijednosti struje i napona linearne i vremenski nepromjenjive(LVN), pa im se usrednjavanjem struktura ne mijenja. • Prema tome, rezultati kojiproizlaze iz uvjetnih jednadžba na trenutačne vrijednosti struje i napona, kao što jezakon očuvanja energije i njegovo poopćenje u Tellegenovu teoremu, vrijede i zatrenutačne srednje vrijednosti. • Slično, usrednjavanjem uvjetnih jednadžba na prilazne napone i prilazne strujeLVN elemenata proizlazi da su trenutačne vrijednosti i trenutačne srednje vrijednostiLVN elemenata spregnute identičnim uvjetnim jednadžbama.
USREDNJAVANJE STRUJNOG KRUGA • Primjerice, zaLVN otpor, usrednjavanjem jednadžbe vR(t)=RiR(t) dobiva se: • Ili, za LVN induktivitet, usrednjavanjem jednadžbe: • dobiva se:
USREDNJAVANJE STRUJNOG KRUGA • Te jednadžbe omogućuju izgradnju usrednjenog kruga sljedećim postupkom: • Sve trenutačne vrijednosti napona i struja zamjenjuju se trenutačnim srednjim vrijednostima.LVN elementi ostaju nepromijenjeni. • Međutim, nelinearni ili vremenskipromjenjivi elementi ne mogu se zamijeniti jednakim elementima u usrednjenomkrugu. Primjerice, sklopke se zamjenjuju elementima koji na svojim prilazimaistodobno imaju i srednju vrijednost napona i srednju vrijednost struje – to znači da sklopke iz trenutačnog kruga više nisu sklopke u usrednjenom krugu. • Unatoč činjenici da su iz trenutačnog kruga ostali nepromijenjeni samo LVNelementi, pretvorba u usrednjeni krug često je vrlo korisna. Dijelovi usrednjenogkruga, ako već ne i cijeli krug, mogu se analizirati istim metodama kojima se analizirajuLVN krugovi. Primjerice, mogu se uporabiti impedancijske metode, metodasuperpozicije ili zamjena prema Théveninu ili Nortonu – što je često dovoljno zadobro razumijevanje ponašanja sklopa. • Čak ako se egzaktan usrednjeni krug teško analizira ili ako se uopće ne možeanalizirati, neke aproksimacije daju dobre uvide.
PRIMJER 4. Trenutačni krug a) i usrednjeni krug b) učinskog sklopa reguliranoga elektromotornog pogona napajanog iz usmjerivača Slika a) prikazuje model armaturnog kruga reguliranoga elektromotornogpogona napajanog iz usmjerivača iz primjera 2. Otpor R i induktivitet L označujuarmaturni otpor i induktivitet, a E protuelektromotornu silu motora. Valni obliknarinutog napona vdveć smo upoznali ranije – napon usmjerivača). @eli se upravljati srednjom vrijednošćuarmaturne struje. Prema novom načinu označivanja ta se varijabla označuje s i–d(t). U tom primjeru, prirodno je za interval usrednjavanja T odabrati periodu napona vd(koja je jednaka poluperiodi sinusnoga naponskog izvora). U ustaljenom su stanjuv–d i i–d konstantni i jednaki VdAVi IdAV. ( )
USREDNJAVANJE STRUJNOG KRUGA • Slika b) prikazuje rezultat usrednjavanja učinskog kruga sa slike a).Usrednjeni upravljivi ispravljač jednostavno je prikazan naponskim izvorom, to jemoguće zato jer je v–d potpuno definiran upravljačkom varijablom, tj. kutom upravljanjaα. • Upotrebljivost usrednjenog kruga može se ilustrirati razmatranjem odziva sustavabez povratne veze na skokovitu pobudu, tj. razmatranjem prijelaza iz jednogaustaljenog stanja u drugo. • Skokovita promjena kuta upravljanja α od jednoga dodrugoga uzastopnog okidanja prouzročuje prijelaz trenutačne srednje vrijednosti izlaznognapona v–d iz ustaljenog stanja prije pobude u ustaljeno stanje nakon pobudeu vremenu ne duljem od jedne poluperiode mrežnog napona. Iz razmatranja usrednjenogkruga proizlazi da se nakon prve periode struja i–d približava novoj ustaljenojvrijednosti eksponencijalno s vremenskom konstantom L/R. • Prva je perioda običnomali dio trajanja prijelazne pojave. Tipična vrijednost vremenske konstante L/Rmože biti oko 40 ms; tako prijelazna pojava traje oko 120ms, a interval usrednjavanjaT za napojnu mrežu frekvencije 60 Hz iznosi samo 8,33 ms* (za šestopulsni usmjerivačnapajanim iz trofazne mreže interval usrednjavanja T iznosi 2,78 ms, pazite pretpostavljen je američki sustav napajanja, izračunajte vrijednosti za europski sustav).
USREDNJAVANJE STRUJNOG KRUGA • Služeći se usrednjenim krugom, uspjeli smo lako predvidjeti osnovne značajkeodziva na skokovitu pobudu dovoljno iscrpno za većinu primjena. Primjeri pokazuju da usrednjeni krug može biti polazište za projektiranjejednostavnoga upravljačkog sklopa s povratnom vezom. • Točna analiza usrednjenog ponašanja postaje daleko složenija ako je bilo kojapočetna pretpostavka iz primjera 2 neispunjena, tj. neprekinutost vođenja i zanemarivostkomutacijskih reaktancija. Razlog je tome što v–d tada ovisi o valnomoblikustruje motora, pa se u usrednjenom krugu ne može predočiti naponskim izvorom.Ipak, približna analiza usrednjenog ponašanja često je i dalje moguća i korisna.
PRIMJER 5. a) Valni oblik struje induktiviteta i diode uzlazno-silaznog pretvarača u isprekidanom načinu rada. b) Izlazni dio usrednjenog kruga
PRIMJER 5. Razmotrimo ponovno uzlazno-silazni pretvarač iz primjera 1 i 3, no sadapretpostavimo da je otpor R tako velik da je pretvarač u isprekidanom načinu rada.Odgovarajuće valne oblike struje induktiviteta i diode prikazuje slika a). Trebaizgraditi usrednjeni krug. Za interval usrednjavanja odabrat ćemo sklopnu perioduT. Pobrinemo li se da je napon napajanja konstantan tijekom sklopne periode, tijekomvođenja tranzistora struja induktiviteta raste linearno od 0 do IP=VinDT/L. Nakontoga struja pada na nulu; na slici a) prikazano je da struja pada na nulu po pravcu. No u stvarnosti, kada tranzistor isklopi a dioda provede, struja pada na nulune po pravcu već po valnom obliku prigušenog titraja; naime, isklapanjem tranzistoranastane paralelni RLC krug. Ipak, ako se izlazni napon znatno ne mijenja tijekomsklopne periode, zanimljiv dio valnog oblika prigušenog titraja može se vrlo dobroaproksimirati pravcem. Određenije, ako se izlazni napon može dobro aproksimiratisvojom trenutačnom srednjom vrijednošću (tj. ako je valovitost izlaznog naponamala), struje induktiviteta i diode padaju gotovo linearno brzinom v–o/L.
PRIMJER 5. Uporabom te linearne aproksimacije lako se može, gledajući valni oblik na slici a), izračunati srednja vrijednost struje diode tijekom jedne sklopne periode: (Prisjetite se da je vo negativan, tako su –v–o, id i i–d svi pozitivni.) Pretpostavljajući dase v–d, Vin i D sporo mijenjaju, izraz vrijedi za svaki t, a ne samo u trenutku usrednjavanja(trenutak završetka sklopne periode). Uočite nelinearnu ovisnost i–d(t) o–v–o, Vin, i D. Sada se može nacrtati izlazni dio rezultirajućega usrednjenog kruga, slika b).Struju diode zamjenjuje naponski upravljani strujni izvor. Ta se struja katkad nazivainjektirana struja. Dobiveni nelinearni krug može se upotrijebiti za proučavanjedinamičkog ponašanja v–o, ako su Vin i D konstantni ili ako se sporo mijenjaju.
PRIMJER 5. Upravljačke varijable u primjerima 4 i 5 kut su upravljanja α i faktor upravljanjaD. Za te upravljačke varijable tipično je da se mijenjaju od periode do periode,poprimajući vrijednosti αk i dk u k-toj periodi. Međutim, analiza upravljanja i projektiranjeupravljanja uporabom modela koji istodobno opisuju i vremenski kontinuiranei vremenski diskretne veličine je nespretna. Kod uzorkovnih modela ta je zaprekazaobiđena uporabom uzoraka vremenski kontinuiranih valnih oblika, tj. isključivom uporabom vremenski diskretnih nizova. Uzorkovni modeli bit će raspravljeni u nastavku kolegija. Kod usrednjenih modela prirodnija jesuprotna strategija; naime da se diskretne veličine αk i dk zamijene vremenski kontinuiranimveličinama.
TRENUTAČNA SREDNJA VRIJEDNOST SKLOPNE FUNKCIJE • Usrednjavanjem moduliranog napona istosmjernog naponskog izvoradobiva se istosmjerni ili izmjenični izvor upravljan faktorom vođenja: a)sklopna mreža, b) usrednjeni krug, sa d(t) označen je q–(t) • Shema na slici a) obuhvaća takve pretvarače kao što su silazni pretvarač i PWM izmjenjivač. Kod tih pretvarača između istosmjernoganaponskog izvora Vin i linearnog trošila nalazi se upravljiva sklopnamreža. Na slici je linearno je trošilo nadomješteno Nortonovom mrežom. Naponje na izlazu iz sklopne mreže q(t)Vin; s q(t) označena je sklopna funkcija – to je modulacijskafunkcija napona naponskog izvora. Primjerice, sklopnu funkciju q(t) određuju faktori vođenja sklopka sklopne mreže. Tako napon na trošilu usrednjenogkruga na slici b) iznosi q–(t) Vin.
TRENUTAČNA SREDNJA VRIJEDNOST SKLOPNE FUNKCIJE • Točna analiza usrednjenog ponašanja može se provesti, ako je q–(t) posve određen upravljačkim varijablama i (eventualno) trenutačnom usrednjenom strujomtrošilai–(t). Pod tim uvjetima napon trošila usrednjenog kruga može se modeliratinaponskim izvorom (eventualno strujno upravljanim). Čak i ako ti uvjeti nisu ispunjeni,često je moguća približna analiza usrednjenog ponašanja. Isto tako približnaje analiza moguća ako napon izvora nije potpuno istosmjeran nego gotovo istosmjeran,u smislu da se malo mijenja u intervalu usrednjavanja T. • Sklopna funkcija q(t) obično poprima vrijednosti iz konačnog niza vrijednosti:1 i 0 kod silaznog pretvarača ili 1, 0 i –1 kod PWM izmjenjivača. Trenutke promjenesklopne funkcije od jedne do druge vrijednosti određuje upravljački sklop. U takvim slučajevima trenutačna srednja vrijednost sklopne funkcije q–(t) naziva se kontinuiranifaktor vođenja i označuje se s d(t). Razlozi odabira tog naziva navedeni su uprimjeru 6. Vremenski interval T u kojem se računa trenutačna srednja vrijednostneki je regularni sklopni interval određen taktom sustava. Uočite da d(t) možebiti vremenski promjenjiv, pa i negativan. Međutim, ako je q(t) periodična funkcijai ako je T njezina perioda, tada je d(t) konstantan.
TRENUTAČNA SREDNJA VRIJEDNOST SKLOPNE FUNKCIJE • Sada se može s d(t)Vin označiti vrijednost naponskog izvora u usrednjenom kruguna slici b). Taj izraz pokazuje sljedeće. Ako se d(t) mijenja obrnuto proporcionalnoVin, iz usrednjenog kruga potisnuti su učinci promjena ulaznog napona. Zato setakva unaprijedna veza po ulaznom naponu uvelike upotrebljava u sklopovimanadomjesnesheme prema slici na prethodnom prikazu. Treba primijetiti da takva unaprijedna veza uklanjaučinke promjena ulaznog napona u ustaljenom i prijelaznom stanju, a ona kod uzlazno-silaznog pretvarače iz primjera 1 samo u ustaljenom stanju. • I za mnoge druge učinske pretvarače uporaba sklopne funkcije q(t) i njezinetrenutačne srednje vrijednosti q–(t)=d(t) razumljiva je i prikladna za analiziranje iprojektiranje upravljanja. U mnogim slučajevima upravljački sklop obrađuje veličinekoje su usko povezane s d(t) i na taj način upravlja srednjim vrijednostima varijablapretvaračkog sklopa.
GENERIRANJE SKLOPNE FUNKCIJE • Čest je slučaj kod kojega sklopka uklapa kada je q(t)=1, a isklapa kada jeq(t)=0. Sklop za generiranje takve sklopne funkcije prikazuje shematski slikaa). Sklopna funkcija dobiva se na izlazu iz spremnika stanja. Davač takta postavljaizlaz spremnika stanja na 1 svakih T sekundi, definirajući time početak periode. • Izlaz komparatora prvotno je nizak, ali tijekom periode postaje visok, ponovnopostavljajući spremnik stanja na nulu. • Pilasti napon sinkroniziran s impulsima davača takta dovodi se na pozitivni ulazkomparatora. Kreće od 0 svakih T sekunda i linearno raste do vrijednosti K. Modulacijskisignal m(t) dovodi se na negativni ulaz komparatora i poprima vrijednosti0≤m(t)≤K. Prema tome, izlaz je komparatora nizak na početku svake periode i postaje visok kada pilasti napon postane veći m(t). Faktor vođenja k-te periode dk jednakje omjeru m(t)/K. Taj faktor vođenja odnosi se na trenutak u kojem pilasti napon prvi put u periodi siječe m(t). Na taj način modulacijski signal m(t) upravlja faktoromvođenja. • Konstantni faktor vođenja može se dobiti ili održavanjem m(t) konstantnim ilinjegovim mijenjanjem točno na sklopnoj frekvenciji. Te dvije mogućnosti ukazujuna dva načina dobivanja sporih promjena faktora vođenja: ili sporim mijenjanjemm(t) ili njegovim mijenjanjem na frekvenciji bliskoj sklopnoj frekvenciji. U drugomse slučaju faktor vođenja mijenja na frekvenciji treptaja*.
PRIMJER 6. • Obje se metode upotrebljavaju u praksi. Štoviše, obje se metode upotrebljavajuistodobno kod visokofrekvencijskih istosmjernih pretvarača u sklopnom načinurada s tzv. strujnim načinom upravljanja. Jedna komponenta m(t) dobiva se iz srednje vrijednosti izlaznog napona pa sadrži niskofrekvencijske komponente (tj. m(t) semijenja na niskoj frekvenciji), a druga iz trenutačne struje induktiviteta ili sklopkepa sadrži niskofrekvencijske komponente i komponente čije su frekvencije blizusklopne frekvencije. U slučaju strujnog načina upravljanja,pilasti se napon naziva stabilizacijski pilasti napon ili kompenzacijskipilasti napon. • U sljedećim razmatranjima pretpostavljat će se da se m(t) sporo mijenja.Ako se m(t) tijekom periode značajno ne mijenja, tj. ako se znatne promjenem(t) događaju na frekvencijama znatno nižim od polovice sklopne frekvencije, tada u svakom trenutku omjer m(t)/K dobro aproksimira potreban faktor vođenja. Upravljački krug mijenja vrijednost m(t) oko nazivne vrijednosti u skladu s potrebom povećanja ili smanjenja faktora vođenja. To mijenjanje m(t) određuju signali povratneveze koji mjere odstupanje rada učinskog sklopa od nazivnog. Očito, širina frekvencijskogpojasa kruga povratne veze takvog sustava može biti znatno manja od polovicesklopne frekvencije. Ili drugim riječima, vrijeme u kojem se upravljani sustavvraća u nazivni rad znatno je duže od dvostruke sklopne periode.
PRIMJER 6. • Slika b) prikazuje međusobne odnose modulacijske funkcije m(t), sklopnefunkcije q(t), kontinuiranog faktora vođenja d(t) i diskretnog faktora vođenja dk.Kontinuirani faktor vođenja d(t) dobro aproksimira potreban diskretni faktor vođenja dk, ako se dk od periode do periode sporo mijenja. A dk se sporo mijenja jerse m(t) sporo mijenja. Usto, funkciji d(t) svojstveno je da se sporo mijenja. Najbržamoguća promjena dk nastaje kada naizmjence poprima velike i male vrijednosti odjedne do druge uzastopne periode. Odgovarajuća perioda od d(t) tada iznosi 2T. Stoga d(t) nema nikada frekvenciju osnovnog harmonika veću od polovice sklopnefrekvencije. • Uočite da se za mijenjanje faktora vođenja može upotrijebiti i K. Unaprijednoupravljanje koje kompenzira promjene napona napajanja obično radi na tom načelu. • Primjerice, u uzlazno-silaznom pretvaraču iz primjera 1 i 3, željena unaprijednaveza može se ostvariti tako da se K učini proporcionalnim Vin–Vref (podsjetitese da je Vref negativan). U silaznim i drugim pretvaračima nadomjesne sheme poputone na prikazu 53 učini se K proporcionalnim Vin.
PRIMJER 6. • Naši usrednjeni modeli obično otkrivaju dinamičku ovisnost usrednjenih valnihoblika u učinskom krugu o d(t). Međutim, za projektiranje upravljačkih krugova zanimljivijaje ovisnost o nekom stvarnom modulacijskom upravljačkom signalu, kaošto je m(t) u primjeru 6. Za spore promjene modulacijskog signala m(t) vrijedid(T)≈m(t)/K, pa su usrednjeni modeli svrhoviti. No, ako se promjene modulacijskogsignala m(t) odigravaju na frekvencijama većim ili čak blizu polovice sklopnefrekvencije, odziv usrednjenih modela na promjene d(t) nije ujedno i odziv na promjenem(t).
USREDNJAVANJE (PWM) SKLOPKE • Do sada smo uspjeli objasniti usrednjavanje linearnih elemenata, preostao je složeniji posao, a to je usrednjavanje nelinearnih elemenata, upravljive (aktivne) sklopke- tranzistora i neupravljive (pasivne) sklopke – diode • Sada nailazimo na probleme, jer se u literaturi nailazi na mnoštvo načina označavanja, pa čak i na različite pristupe modeliranju. Nama je glavna nit vodilja Kassakian, no dopunit ćemo ga i proširiti objašnjenjima i primjerima i druge literature (Ang, Erikson i sl.). To će neizbježno dovesti do pomalo zbunjujućeg miješanja oznaka i simbola, što ćemo pokušati izbjeći napomenama. • Pogledamo li topologije temeljnih istosmjernih pretvarača bez galvanskog odvajanja, koji predstavljaju okosnicu našeg izučavanja, može se uočiti da sva tri temeljna istosmjerna pretvarača imaju aktivnu i pasivnu sklopku te prigušnicu spojene na jednak način. • Taj spoj tranzistora, diode i prigušnice nazivamo općim sklopnim elementom istosmjernih pretvarača ili PWM sklopkom.
USREDNJAVANJE (PWM) SKLOPKE • Tri osnovne topologije istosmjernih pretvarača (silazni - GORE, uzlazni - SREDINA, uzlazno-silazni - DOLJE). • Jasno se vidi osnovni sklopni element, odnosno PWM sklopka (osjenčano) kod sve tri topologije. • Način označavanja je različit od Kassakiana, ali najlogičniji i najintuitivniji. • Točka u kojij su povezani aktivna i pasivna sklopka je zajednička (common), pa ima oznaku C. (kod Kassakiana – x) • Točka pristupa prema aktivnoj sklopki (tranzistoru) ima oznaku A ili (a) (od active) (kod Kassakiana – y) • Točka pristupa prema pasivnoj sklopki (diodi) ima oznaku P (ili p) (od passive) (kod Kassakiana – z)
USREDNJAVANJE (PWM) SKLOPKE • Uočimo još da se na C pristup povezuje prigušnica L, a da se između A i P pristupa nalazi istosmjerni napon (ulazni napon, izlazni napon ili razlika ulaznog i izlaznog napona). • Model PWM sklopke je univerzalan i jednostavnim permutiranjem elemenata koji se priključuju na pojedine pristupe mogu se ostvariti sve osnovne vrste istosmjernih pretvarača. • Usrednjiti PWM sklopku znači zamijeniti tranzistor i diodu iz trenutačnog modela odgovarajućim elementima u usrednjenom krugu, a to će biti upravljivi naponski i strujni izvori
USREDNJAVANJE (PWM) SKLOPKE • Opći sklopni element prema Kassakianu (x = c, y = a, z = p) • Položaj kapaciteta C je pomalo zbunjujući, no bitno je da se pristupi kapaciteta nalaze na točkama s nepromjenjivim naponom (DC)
USREDNJAVANJE (PWM) SKLOPKE • Za interval usrednjavanja uzima se sklopna perioda T • Pretpostavke za usrednjavanje mogu se izraziti kao: • 1. Pretpostavka male valovitosti: napon vyz(t) = vap(t)(=vC) i struja ix(t) = ic(t) (=iL) u trenutkut približno su (dovoljno točno) jednaki svojoj trenutačnoj srednjoj vrijednostiv–yz(t) i i–x(t)(v–ap(t) i i–c(t)). • 2. Pretpostavka sporih promjena: trenutačne srednje vrijednosti v–yz(t) i i–x(t)(v–ap(t) i i–c(t))znatno se ne promijene od t–T do t (za bilo koji trenutak t), tj. frekvencijanjihova mijenjanja bitno je manja od polovice sklopne frekvencije. • Obje pretpostavke uglavnom su zadovoljene u dobro projektiranim visokofrekvencijskimsklopnim pretvaračima u neisprekidanom načinu rada.
USREDNJAVANJE (PWM) SKLOPKE • Uzmimo da se sklopka (preklopka) na slici upravlja sklopnom funkcijom q(t) kojapoprima vrijednosti 0 i 1 • Neka sefaktor vođenja d(t) odnosi na y-položaj kontakta. To je a-položaj, odnosno aktivna ili upravljiva sklopka, znači faktor vođenja odnosi se na vođenje aktivne sklopke (tranzistora). • Budući da je iy=qix(ia=qic), vrijedi i–y=(qi)–x(i–a=(qi)–c). Sklopna funkcija određuje struju aktivnog pristupa. Struja teče kroz aktivnu sklopku kada je sklopna funkcija poprima vrijednost 1. • Na temelju gornjih pretpostavka dopušteno je ix(τ) u intervalu usrednjavanjat –T≤τ≤t smatrati konstantnim i iznosa i–x(t), pa je:
USREDNJAVANJE (PWM) SKLOPKE • Slično razmišljanje vrijedi i za napone, vxz=qvyzvcp=qvappa je: • Dobivene željene uvjetne jednadžbe približno karakterizirajuusrednjenu sklopku (element s trima prilazima potpuno je karakteriziran s dvjemauvjetnim jednadžbama koje određuju odnose između prilaznih varijabla). Te uvjetnejednadžbe određuju odnose između trenutačno usrednjenih prilaznih varijabla. • Uočite da uvjetne jednadžbe ovise o kontinuiranom faktoru vođenja d(t). Zato se,za te uvjetne jednadžbe, kaže da su to upravljačko-ovisni uvjeti.
USREDNJAVANJE (PWM) SKLOPKE • Na osnovi te karakterizacije mogu se izvesti dva strujna kruga, slike b) i c). Iako su oba kruga međusobno ekvivalentna, krug s upravljivim izvorimapogodniji je za rješavanje zadataka koji se rješavaju metodom linearizacije; to će sekasnije razmatrati. Krug s idealnim transformatorom koristan je za rješavanje zadataka kod kojih je faktor vođenja konstantan. • Topologije pretvaračkih sklopova visokofrekvencijskih pretvarača iz 6. i 7. poglavljaimaju opći sklopni element, a svi ostali elementi linearni su i vremenski nepromjenjivi.Za sve te pretvaračke sklopove usrednjeni se krug dobiva jednostavnom zamjenomopćega sklopnog elementa njegovim usrednjenim modelom. b) Približno usrednjeni opći sklopni element za slučaj neisprekidanograda pri faktoru vođenja d zasnovan na upravljivim izvorima. c) Približno usrednjeni opći sklopni element za slučaj neisprekidanograda pri faktoru vođenja d (d′=1–d) zasnovan na idealnom transformatoru
PRIMJER 7. • U topologiji uzlazno-silaznog pretvarača može se prepoznatiopći sklopni element. Uočite da u tom slučaju napon vyz na slici iznosi vin–vC,a ne vC. • Da bi se dobio usrednjeni krug, opći sklopni element treba zamijeniti usrednjenim, tj. diodu i tranzistortreba zamijeniti idealnimtransformatorom – jedan namot ima broj zavoja d′(t), a drugi d(t). Usto, sve trenutačne vrijednosti treba zamijeniti njihovim srednjim vrijednostima. Rezultat tih zamjenaprikazan je na donjoj slici. • Za vježbu pokušajte u SIMPLORER-u modelirati usrednjenu sklopku pomoću upravljivih strujnih i naponskih izvora (DZ)
PRIMJER 7. • Na tom usrednjenom krugu mogu se zasnovati i druge vrste analitičkih modela,primjerice modeli u prostoru stanja. Osim toga, taj usrednjeni krug mogu izravnoprihvatiti mnogi standardni paketi za simulaciju električnih sklopova. Uočite da jeusrednjeni krug nelinearan, naime strujne i naponske varijable kruga nelinearnoovise o upravljačkoj varijabli d(t). Metoda linearizacije koja će biti objašnjena u nastavku predavanja jedna je od metoda rješavanja takvih nelinearnosti. • Ako je faktor vođenja d(t) konstantan, usrednjeni krug na slici linearanje i vremenski nepromjenjiv, pa je analiza u tom slučaju jednostavna. Primjerice, tajse krug može odmah upotrijebiti za dobivanje srednjih vrijednosti struja i napona unazivnom ustaljenom stanju pri v–in=Vin i d(t)=D. U nazivnom ustaljenom stanjusrednja vrijednost napona na induktivitetu i srednja vrijednost struje kroz kapacitetjednaki su nuli, te činjenice vode do sljedećih jednadžba za srednju ustaljenu strujukroz induktivitet IL: (odgovaraju već izvedenim transformatorskim jednadžbama) • i srednji ustaljeni izlazni napon Vo (ili napon na kapacitetu VC):
PRIMJER 7. • Zaključimo; pomoću približno usrednjenog općeg sklopnog elementa moguće je dobiti usrednjeni model strujnog kruga istosmjernog pretvarača koji nam omogućava analizu istosmjernih odnosa u pretvaraču, primjerice dobivanje transformatorskih jednadžbi pretvarača. • Usrednjeni krug uz to daje podloge za razumijevanje rezultata dobivenih u primjeru1. U tom primjeru istraživao se odziv izlaznog napona vo(=vC) na skokovitupromjenu ulaznog napona vin uz otvorenu povratnu vezu i konstantan d(t)=D. • Prijenosna funkcija od trenutačne srednje vrijednosti ulaznog napona do trenutačnesrednje vrijednosti izlaznog napona tog usrednjenog kruga ima oblik:
PRIMJER 7. • Ta prijenosna funkcija u elektroakustici naziva se audiosusceptibilna prijenosnafunkcija. Ako se ulazni napon vin(t) skokovito promijeni, trenutačna se srednjavrijednost ulaznog napona v–in(t) ne mijenja skokovito; v–in(t) se promijeni od početne do konačne vrijednosti u vremenu jednakom trajanju intervala usrednjavanja T. Tijekomtog vremena aproksimacija je slaba. Međutim, kako je trajanje intervalausrednjavanja T mnogo manje od vremenskih konstanta usrednjenog modela,promjena v–in(t) može se smatrati skokovitom. • Zato se prijenosna funkcija usrednjenog modela može upotrijebiti za računanje odziva na skokovitu promjenuulaznog napona. • Za projektiranje upravljanja izuzetno je važna prijenosna funkcija od faktora vođenja do izlaznog napona, a ona se zbog nelinearnosti ne može dobiti na temelju ovog najjednostavnijeg usrednjavanja – potrebna je linearizacija
UTJECAJ PARAZITNIH ELEMENATA Katkad je otpor kapaciteta općega sklopnog elementa znatan; tada se modeliraekvivalentnim serijskim otporom (ESR). U tom slučaju napon vyz više ne zadovoljava pretpostavku male valovitosti na kojoj se zasniva aproksimacija. No, usrednjeni model općeg sklopnog elementa može se poboljšati te razvitiusrednjeni model koji ne zanemaruje ekvivalentni serijski otpor. Postoje i druge komponente koje “kvare” točnost jednostavnog usrednjenog modela, primjerice pad napona i dinamički otpor diode i tranzistora. Koristeči zakon očuvanja energije moguće je i utjecaj tih komponenata uzeti u obzir i poboljšati točnost usrednjenog modela. Alternativni jepristup usrednjavanju putem prostora stanja, taj pristup omogućujesustavno bavljenje tim problemima. To je predmet izučavanja u nastavku predavanja.
ISPREKIDANI NAČIN RADA Prije izvedeni usrednjeni model sklopke ne vrijedi za isprekidani način rada. Preklopka osnovnoga sklopnog elementa u slučaju isprekidanog načina rada zauzima treći položaj, tj. kontakt nije ni u položaju y ni u položaju z. Polazeći od činjenice da je srednja vrijednost napona na induktivitetu približno jednaka nuli, može se još uvijek izvesti usrednjeni model sklopke. Međutim, analiza kojuilustrira primjer5. obično je jednostavnija. Na jednom primjeru (u kasnijoj fazi predavanja) pokazat ćemo kako se rješava problem modeliranja isprekidanog načina rada.
LINEARIZIRANI MODELI • Statičke karakteristike sklopova učinske elektronike često nelinearno ovise oupravljačkim varijablama. Dinamičke karakteristike o njima ovise čak još češće. S linearnomili s nelinearnom povratnom vezom, tipičan je sustav s povratnom vezomnelinearan. • Procjenjivanje stabilnosti te projektiranje i vrjednovanje upravljačkih sklopovauporabom nelinearnih modela obično je mukotrpno. Najuobičajeniji, sustavan i ponajčešće uspješan pristup tim zadaćama je linearizacija. Linearizacijom se dobivaju linearnimodeli koji približno opisuju poremećaje ili mala odstupanja sustava od nazivnograda. Linearni su modeli, dakako, daleko jednostavniji za analizu od nelinearnih. • Linearizirani modeli, nazivaju se i modeli za male signale, ključni su za prosuđivanjestabilnosti u nazivnim radnim uvjetima. Stabilnost lineariziranog modela u nazivnimradnim uvjetima pokazuje da je rad sustava, barem za male poremećaje, stabilan u nazivnim radnim uvjetima. Stoga je prvi zadatak kod projektiranja upravljanjapostizanje stabilnosti lineariziranog modela. Ta je zadaća daleko lakša od postizanjastabilnosti nelinearnog modela.
LINEARIZIRANI MODELI Postupak linearizacije vremenski kontinuiranih i vremenski diskretnih dinamičkih modela započinje od nazivnog rješenja. Nazivno rješenje određuju nazivniradni uvjeti. U većini slučajeva nazivno rješenje opisuje ustaljeno stanje dinamičkogmodela. U ustaljenom stanju tipičnoga dinamičkog modela učinskog sklopa varijable suprije periodički promjenjive nego konstantne. Primjerice, ustaljeno stanje vremenskikontinuiranog modela uzlazno-silaznog pretvarača određuje periodična sklopnafunkcija te su valni oblici periodični. Ako se želi dobiti konstantno ustaljeno stanjeumjesto periodičnoga ustaljenog stanja, treba napustiti vremenski kontinuirane modeleučinskih sklopova i prijeći na, primjerice, njihove vremenski diskretne modele. Vremenski diskretni modeli zasnivaju se na uzorkovanju sklopovskih varijabla jednomtijekom svake periode. O vremenski diskretnim modelima bit će riječi kasnije.
LINEARIZIRANI MODELI Konstantno ustaljeno stanje, tj. stanje u kojem su trenutačno usrednjene varijablekonstantne, mogu iskazivati i usrednjeni modeli. Usrednjeni model uzlazno-silaznog pretvarača iskazuje konstantno ustaljeno stanje, ako je faktor vođenja d(t) konstantan. Međutim, kod usrednjenih modela visokofrekvencijskih PWM izmjenjivačkih sklopovau ustaljenom stanju trenutačno se usrednjene varijableperiodički mijenjaju i nisu konstantne. Mala odstupanja od nazivnih vrijednosti mogu se opisati razvojem svih nelinearnihelemenata modela u Taylorov red oko svojih nazivnih vrijednosti. Zadržavanjemsamo članova prvog reda dobiva se linearni model, tzv. linearizirani model,koji približno spreže mala odstupanja.Parametri lineariziranog modela ovise o nazivnom rješenju jer o njemu ovisekoeficijenti Taylorova reda. Ako je polazni nelinearni model vremenski nepromjenjivi ako nazivno rješenje određuju konstantne vrijednosti varijabla, linearizirani jemodel uvijek linearan i vremenski nepromjenjiv (LVN).
LINEARIZACIJA STRUJNOG KRUGA Postupak je linearizacije modela predočenog nelinearnim strujnim krugom jednostavan,tj. putem jednostavnih koraka iz nelinearnog se strujnog kruga dobiva lineariziranistrujni krug. Postupak i opravdanje postupka linearizacije analogni suonima u kojema je iz trenutačnog modela strujnog kruga dobivenusrednjeni. Argumenti postupka bi, primjerice, trebali biti poznati još iz analizetranzistorskih pojačala za male signale. Najprije se svaki napon u nelinearnom strujnom krugu zamijeni svojim odstupanjemod nazivnog. Tim korakom dobiju se odstupanja napona koja zadovoljavajuKirchhoffov zakon napona (KZN). KZN je zadovoljen zato jer i perturbirani niznapona i nazivni niz napona zadovoljavaju iste linearne jednadžbe i jer je svako odstupanjenapona razlika perturbiranog i nazivnog napona. Slično, svaka struja zamijeni se svojim odstupanjem od nazivne. Tim korakom dobivaju se odstupanja strujakoja zadovoljavaju Kirchhoffov zakon struje (KZS).
LINEARIZACIJA STRUJNOG KRUGA Zadnji je korak zamjena svakog nelinearnog elemenata svojom lineariziranom inačicom. (Linearne elemente ne treba zamijeniti jer postavljaju jednake uvjete naodstupanja kao i na ukupne vrijednosti varijabla.) Linearizacija nelinearnog elementaprovodi se razvojem njegovih karakterističnih jednadžba u Taylorov red douključujući člana prvog reda. Linearizirani element postavlja linearne uvjete na malaodstupanja prilaznih varijabla i na mala odstupanja ma koje upravljačke varijableelementa. Rezultat svih tih pretvorbi linearni je krug koji približno određuje malaodstupanja varijabla od nazivnih vrijednosti. Prije opisani usrednjeni krugovi bili su nelinearni i vremenski nepromjenjivi.Njihovom linearizacijom dobiva se LVN krug. Obično nas je zanimalo nazivno rješenje za konstantno ustaljeno stanje. U slučaju usrednjenih modela PWM izmjenjivačkih sklopova, zanima nas nazivno rješenje za periodičko ustaljenostanje. Njihovom linearizacijom dobiva se periodički promjenljivi krug. No najbolje je dobro proučiti postupak linearizacije na primjerima!
PRIMJER 8. • Nelinearni usrednjeni model učinskog sklopa uzlazno-silaznog pretvarača uisprekidanom načinu rada izveden je u primjeru 5, slika b). Izvod modelapokazuje da se faktor vođenja i ulazni napon smiju sporo mijenjati, tj. da ne morajubiti konstantni. Zato se u izraz za srednju vrijednost struje diode smije uvrstiti d(t) umjesto D i v–in(t) umjestoVin. Oznake D i Vin isključivo označuju konstantne nazivne vrijednosti. • Nazivno rješenje opisuje ustaljeno stanje. Određuju ga konstantne vrijednostitrenutačno usrednjenih veličina, posebice: . Kapacitet usrednjenogkruga u ustaljenom stanju prestavlja prekid, pa se s pomoću slike b) uviđa da je: • Sređivanjem i računanjem drugog korijena dobiva se: • U skladu s dogovorom o predznacima ispred drugog korijena predznak je minus.
PRIMJER 8. • Neka se sada promijeni faktor vođenja od D na d(t)=D+d∼(t). Pretpostavimo,jednostavnosti radi, da je ulazni napon konstantan i da iznosi Vin. U skladu s time neka su: i–d(t)=Id+i∼d (t) i v–o(t)=Vo+v∼ o (t). • Tilda (znak ∼) označuje promjenu vrijednostivarijable u odnosu na njezinu nazivnu vrijednost. • Linearizacijom strujnog izvora usrednjenog kruga razvojem u Taylorov red do uključujući člana prvog reda(član prvog reda još se naziva linearni član), dobiva se: • Parcijalne derivacije računaju se u nazivnoj točki. Pojednostavnjenjem izraza s pomoću prethodnog izraza za izlazni napon dobiva se:
PRIMJER 8. • Dobili smo linearizirani usrednjeni strujni krug uzlazno sliaznog pretvarača u isprekidanom načinu rada • Možemo ga usporediti s izvornim samo usrednjenim modelom istog pretvarača • Nakon linearizacije, paralelno kapacitetu pojavljuje se otpor R. Očito, ako se paralelno kapacitetu doda otpor, poveća se prigušenje te odstupanjev∼o pada brže prema nuli. Razumljivo, ne smije se dodati fizički otpor jer setime smanjuje djelotvornost pretvarača. No, učinak fizičkog otpora može se u potpunostioponašati s pomoću upravljanja.
PRIMJER 8. • Može se uočiti sljedeće:Ako se uporabom proporcionalne povratne veze iznudid∼(t)=hv∼o(t), gdje je h konstanta, učinak je isti kao da se strujni izvor zamijenio otporom vodljivosti hVin . Proporcionalno-integralno upravljanjeima isti učinak kao zamjena strujnog izvora paralelnim spojem otpora i induktiviteta. • Taj je induktivitet uzrok da je ustaljena vrijednost v∼o jednaka nuli, čak i u slučaju netočnih parametara ili konstantnih poremećaja (npr. odstupanje induktiviteta pretvarača ili konstantno odstupanje ulaznog napona od njihovih nazivnih vrijednosti). • Prema tome, model sklopa često omogućuje dublji uvid u projekt upravljanja, primjericeu idejnoj fazi projekta ili u fazi tumačenja projekta. • Stoga se može zaključiti da model sklopa, osim što je polazište za rješavanje zadaća u svezi analize stabilnostii projekta upravljanja, može katkad izravno upućivati na rješenje upravljanja.
LINEARIZACIJA USREDNJENE SKLOPKE Već je pokazano kako se usrednjava učinski krug visokofrekvencijskoga sklopnog istosmjernog pretvarača. Osnovno je znati usrednjiti preklopku općega sklopnog elementa. Nesklopni elementi najčešće se modeliraju LVN elementima, pa sezato usrednjavanjem ne mijenjaju. Slično, ključni korak u linearizaciji nelinearnoga usrednjenoga kruga takvogpretvarača linearizacija je usrednjenog modela preklopke. Ako su ostali nesklopnielementi LVN elementi, oni se linearizacijom ne mijenjaju. Linearizacija usrednjenog modela preklopke prikazane na slici provodise lako. U tu svrhu označimo nazivne vrijednosti velikim kosim slovima, a odstupanjatildom iznad maloga kosog slova, kao u primjeru 8. Nazivno rješenje najčešće opisuje konstantno ili periodičko ustaljeno stanje, no poznavanje nazivnog rješenja za sljedeću linearizaciju nije potrebno. Može se napisati:
LINEARIZACIJA USREDNJENE SKLOPKE Sličan postupak se ponavlja i za ostale varijable usrednjenog strujnog kruga. Sada se varijable izvora d(t)i–x(t) i d(t)v–yz(t) na slici razviju, glede odstupanja, do uključivo člana prvog reda, tj. do uključivo linearnogčlana. Prema tome zanemaruju se kvadratni članovi i umnošci malih odstupanja. Dobivaju se sljedeća odstupanja prvog reda varijabla izvora:
LINEARIZACIJA USREDNJENE SKLOPKE Rezultate tog računa predočuje linearizirani krug na slici a) i ekvivalentni linearizirani krug na slici b). Uočavamo da ovdje više nema nelinearnih ovisnosti između varijabli, radi se o linearnom krugu, te mu je i primjena znatno šira od prethodnog samo usrednjenog strujnog kruga.