Download
1 / 13
140 likes | 328 Views
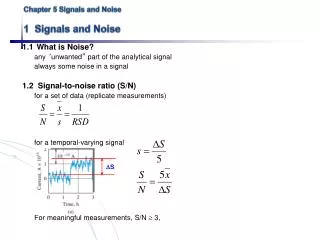
Continuous-Time Detection of Deterministic Signals in White Gaussian Noise. ECE 7251: Spring 2004 Lecture 35 4/9/04. Prof. Aaron D. Lanterman School of Electrical & Computer Engineering Georgia Institute of Technology AL: 404-385-2548 <lanterma@ece.gatech.edu>. Weirdness of White Noise.

E N D
Continuous-Time Detection of Deterministic Signals inWhite Gaussian Noise ECE 7251: Spring 2004 Lecture 35 4/9/04 Prof. Aaron D. Lanterman School of Electrical & Computer Engineering Georgia Institute of Technology AL: 404-385-2548 <lanterma@ece.gatech.edu>
Weirdness of White Noise • Continuous-time white noise noise has covariance function Dirac delta • Integral equation for K-L expansion is • Any othonormal set will work! (only true for white noise; K-L expansions are usually unique)
A Basic Hypothesis Testing Problem • Discussion based on Van Tress, Vol. I, • pp. 254-257 • Signals normalized: • Not necessarily orthogonal; define correlation coefficient
As , the set of observablesYkbecomes equivalent to the original random process Y(t) Ulf Grenander calls these random variables observables Grand Strategy • Trouble: Can’t directly write a density defined on a continuous time process Y(t) • Solution: Expand in an orthonormal basis
Remaining chosen to form a complete set and be orthogonal to and (we won’t need these explicitly) A Choice of Basis Functions • In our basic problem, the noise is white, so anyorthonormal basis will do. Try
Loglikelihood Ratio • Only Y1 and Y2 matter; the remaining do not depend on which hypothesis is true and are independent of Y1 and Y2, so the loglikelihood ratio test (from a previous lecture) is
A Rearrangement of Terms • EFTR:Derive this alternate test form: Just a projection onto a distance vector
v u Say H0 Say H1 Decision line Can simplify by expressing in a new coordinate system (u,v); coordinates still independent, but only v matters A Graphical Interpretation
Alternate Method of Computation • Normalized difference signal: EFTR: Confirm has unit energy • New test statistic computed by
Moments of Statistic V • EFTR: Confirm that
Performance • Detectability index given by • For a Bayesian test • For a minimum probability of error test for equal priors • (Minimum distance receiver)
Signal Selection • Suppose each signal has same energy E • For othogonal signals, • For antipodal signals, i.e, ,