Modern Control Systems (MCS)
Modern Control Systems (MCS). Lecture-35-36 Design of Control Systems in Sate Space Reduced Order State Observer . Dr. Imtiaz Hussain email: imtiaz.hussain@faculty.muet.edu.pk URL : http://imtiazhussainkalwar.weebly.com/. Introduction.

Modern Control Systems (MCS)
E N D
Presentation Transcript
Modern Control Systems (MCS) Lecture-35-36 Design of Control Systems in Sate Space Reduced Order State Observer Dr. Imtiaz Hussain email: imtiaz.hussain@faculty.muet.edu.pk URL :http://imtiazhussainkalwar.weebly.com/
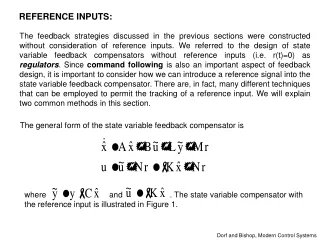
Introduction • The state observers discussed in previous lecture was designed to estimate all the state variables. • In practice however, some of the state variables may be accurately measured. • Therefore, such accurately measurable state variables need not be estimated. • In that case a reduced order state observer may be designed to estimate only those state variables which are not directly measurable.
Introduction • Suppose that the state vector xis an n-vector and the output vector yis an m-vector that can be measured. • Since m output variables are linear combinations of the state variables, m state variables need not be estimated. • We need to estimate only n-m state variables. • Then the reduced-order observer becomes an (n-m)thorder observer. • Such an (n-m)thorder observer is the minimum-order observer.
Introduction • Following figure shows the block diagram of a system with a minimum-order observer.
Minimum Order State Observer • To present the basic idea of the minimum-order observer we will consider the case where the output is a scalar (that is, m=1). • Consider the system • where the state vector xcan be partitioned into two parts xa (a scalar) and xb[an (n-1)-vector]. • Here the state variable xa is equal to the output y and thus can be directly measured, and xb is the unmeasurable portion of the state vector.
Minimum Order State Observer • Then the partitioned state and output equations become
Minimum Order State Observer • Then the partitioned state and output equations become • The equation of measured portion of the state is given as • Or • The terms on the left hand side of above equation can be measure, therefore this equation serves as an output equation.
Minimum Order State Observer • Then the partitioned state and output equations become • The equation of unmeasurable portion of the state is given as • Noting that terms Abaxa and Bbu are known quantities. • Above equation describes the dynamics of the unmeasured portion of the state.
Minimum Order State Observer • The design procedure can be simplified if we utilize the design technique developed for the full-order state observer. • Let us compare the state equation for the full-order observer with that for the minimum-order observer. • The state equation for the full-order state observer is • The state equation for the minimum order state observer is • The output equations for the full order and minimum order observers are
Minimum Order State Observer • List of Necessary Substitutions for Writing the Observer Equation for the Minimum-Order State Observer Table–1
Minimum Order State Observer • The observer equation for the full-order observer is given by : • Then, making the substitutions of Table–1into above equation, we obtain • Error dynamics are given as
Minimum Order State Observer • The characteristic equation for minimum order state observer is
Minimum Order State Observer • Design methods • 1. Using Transformation Matrix
Minimum Order State Observer • Design methods • 1. Using Ackerman’s Formula
Example-1 • Consider a system • Assume that the output y can be measured accurately so that state variable x1 (which is equal to y) need not be estimated. Let us design a minimum-order observer. Assume that we choose the desired observer poles to be at
To download this lecture visit http://imtiazhussainkalwar.weebly.com/ End of Lectures-35-36