Download
1 / 50
500 likes | 640 Views
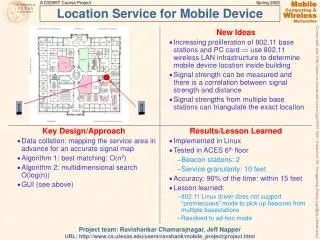
LYU0401 Location-Based Multimedia Mobile Service. Clarence Fung Tilen Ma Supervisor: Professor Michael Lyu Marker: Professor Alan Liew. Outline. Introduction Objective Location-Based Service Current Localization Methods Experimental Study Wi-Fi Location System Future Work Conclusion.

E N D
LYU0401 Location-Based Multimedia Mobile Service Clarence Fung Tilen Ma Supervisor: Professor Michael Lyu Marker: Professor Alan Liew
Outline • Introduction • Objective • Location-Based Service • Current Localization Methods • Experimental Study • Wi-Fi Location System • Future Work • Conclusion
Introduction • In this semester, we mainly focus on the problem of localization • We have chosen the 1st floor of the Ho Sin-Hang Engineering Building to study the problem of localization • Our goal is to locate a person when he/she is walking around on the floor
Objective • To meet the need for Location-Based Service • To find out if Wireless LAN provide enough information for localization in 2D space • Study on different localization algorithms • Develop an application in a mobile device
Location-Based Service • Localization is necessary for many higher level sensor network functions such as tracking, monitoring and geometric-based routing • Three categories: • Global location systems • Wide-area location systems • Indoor location systems • Systems in indoor environment • Infrared (IR) • Ultrasound • Radio signal
Wireless LAN (WLAN)-Based Positioning System Advantages over all other systems • Economical • WLAN network usually exists already as part of the communications infrastructure • Covers a large area • Work in a large building or even across many buildings. • Stable system • Video- or IR-based location systems are subject to restrictions, such as line-of-sight limitations
Current Localization Methods • Point-based approach • goal is to return a single point for the mobile object • E.g. Simple Distance Matching • Area-based approach • goal is to return the possible locations of the mobile object as an area rather than a single point • E.g. Simple-Point Matching, Area-Based Probability
Area-Based Probability (ABP) Advantages: • Presents the user an understanding of the system in a more natural and intuitive manner • High accuracy • More mathematical approach
Steps in using ABP Decide the Areas Measure Signals at Different Areas Create a Training Set Create a Testing Set Measure Signals at Current Position Find out the Probability of Being at Different Areas Calculate Probability Density Return the Area with Highest Probability
Some Terms and Definitions • n Access Points • AP1, AP2, …, APn • Training set T0 • Offline measured signal strengths at different locations an algorithm uses • Consists of a set of fingerprints (Si) at m different areas Ai • T0 = ( Ai, Si ), i = 1 … m
Some Terms and Definitions • Fingerprints Si • Set of n signal strengths at Ai, one per each access point • Si = (si1, …, sin), where sij is the expected average signal strength from APj
Generating Training Set • In one particular Ai, we read a series of signal strengths (sijk ) for a particular APj with a constant time between samples • k = 1… oij ,where oij is the number of samples from APj at Ai • We estimate sij by averaging the series, {sij1, sij2…, sijo }
Generating Training Set • We do the same for all n APs, so we have the fingerprints at Ai, • Si = (si1, …, sin) • We do the same for all m areas, so we have the training set • T0 = ( Ai, Si ), i = 1… m
Collecting Signals • At each area chosen, we measure the signal strength from the access points for 1 minute
Data Processing • We have chosen 7 out of 13 access points • least contribution to localization • shorten computation time • For missing signal strengths, we input -92 dBm as entry
Getting Testing Set • The object to be localized collects a set of received signal strengths (RSS) when it is at certain location • A testing set (St) is created similar to the fingerprints in the training set • It is a set of average signal strengths from APs, St = (st1, …, stn)
Applying ABP • Goal: return the area with a highest probability • Approach: compute the likelihood of the testing set (St) that matches the fingerprint for each area (Si)
Applying ABP Assumptions: • Signal received from different APs are independent • For each APj, j = 1…n, the sequence of RSS sijk, k = 1… oij, at each Ai in To is modeled as a Gaussian distribution
Applying Bayes’ rule • We compute the probability of being at different areas Ai, on given the testing set St • P(Ai |St) = P(St |Ai)* P(Ai)/ P(St) (1) • P(St) is a constant • Assume the object is equally likely to be at any location. P(Ai) is a constant • P(Ai |St) = c*P(St |Ai) (2)
Area Based Probability • We compute P(St |Ai) for every area Ai ,i=1…m, using the Gaussian assumption • Finding Probability Density • the object must be at one of the 12 areas • ΣP(Ai | St) =1 for all i • Max{P(Ai |St) } = Max{c*P(St |Ai) } = Max{P(St |Ai) } • Return the area Ai with top probability
Gaussian Distribution • In our application, we can take μ as the expected average signal strengths for the access point to be calculated • we take σ as 8.5
Integral of Normal Function • Find probability by integration • Take interval as 1
Error function erf(x) • Express Integral of Normal Function in terms of erf • Approximate value of erf by a series • Choose iteration of 50
Experimental Study • Area 5 is near the North-West stairway on the 1st floor • deep purple line is on the top of other lines • Localization system returns the correct result
Accuracy of Localization System • Default sample size of testing set = 4 • 80 testing sets for each of the 12 locations
Other Factors affecting Accuracy • Property of signals • The strength of signals fluctuates • Hardware failure • access points fails to give out signals or give out signals at unusual strength • Change in environment • addition access points on the floor • opening the doors • Orientation in collecting signal
Wi-Fi Location System (WLS) • Development Tool for Location-Based System • Simplify development steps • Increase the efficiency and productivity • It divides into 3 components • Wi-Fi Signal Scanner (WSS) • Wi-Fi Data Processor (WDP) • Wi-Fi Location Detector (WLD)
Wireless LAN Terminology • Media Access Control address (MAC Address) • 48 bits long • unique hardware address • e.g. 00:50:FC:2A:A9:C9 • Service set identifier (SSID) • 32 character • Wireless LAN identifier • Receive Signal Strength Indicator (RSSI) • signal strength • unit is in dBm
Overview • Platform: • Window CE • Window XP, 2000 • Technology: • IEEE 802.11b • Tools • Embedded Visual C++ 4.0 • Visual Studio .NET 2003
Tradition Development Procedure (TDP) • The followings in the Tradition Development Procedure 1-2 week Studying the technology Software Design 2-3 week 1-2 week Algorithm design Final System
Wi-Fi Location System Development Procedure (WLP) Collecting Data Using Wi-Fi Signal Scanner Several hours Processing Data Using Wi-Fi Data Processor 1 day Deploying and Test System Using Wi-Fi Location Detector Several days Final System
Comparison between TDP and WLP • Using WLP, we can develop Location-Based System in a short time. • This work can be done by non-professionals • It simplifies Development Steps
Wi-Fi Signal Scanner • To collect the signal strength received from access points
Collected Data Number of Received Signal Mean of Received Signal Total of Received Signal Strength Signal
Wi-Fi Data Processor • To process collected data Setting and Information Region Access Point Region Position Region
Wi-Fi Data Processor • Two main steps in WDP • Filter out useless data • Set parameters at each position • Data • Name • Point at Map Picture
Wi-Fi Location Detector • Three functions in WLD • To detect the location in the target place • To show the detected position name and corresponding position at the Map Picture • To show calculated probability • Three modes in WLD • Data Mode • Map Mode • Probability Mode
Data Mode • To show the sample data
Map Mode Position Name
Probability Mode • To show calculated probability at each position
Conclusion • We are success in applying Area-Based Probability • We have done experiments on accuracy of algorithm • We have implemented Location-Based Development Tool—Wi-Fi Location System • Based on our knowledge and developed tools in localization, we are able to further develop a location-based service
Future Work • Ho Sin-Hang Engineering Building Tour Guide Service • Multimedia Application with video streaming • Improvement in Localization Algorithm • Increase the Accuracy in Localization • Research on 3D localization algorithm in an building