コントロール( control )
コントロール( control ). 制御. Control :. contra (= against ). +. rotulus (= roll ). 対象とする物(またはシステム)を 自分の思うように操る. 1 序論 1.1 制御とは. 制し御すること.相手方をおさえて 自分の意思のままに動かしてゆくこと. 制御:. (広辞苑 ). 航空・宇宙. スペースシャトル. 航空・宇宙. ALFLEX (小形自動着陸実験機). ロボット. QRIO ( SONY ). ASIMO ( HONDA ). PINO (科学技術振興事業団).

コントロール( control )
E N D
Presentation Transcript
コントロール(control) 制御 Control: contra (= against) + rotulus (= roll) 対象とする物(またはシステム)を 自分の思うように操る 1 序論 1.1 制御とは 制し御すること.相手方をおさえて 自分の意思のままに動かしてゆくこと 制御: (広辞苑 )
航空・宇宙 スペースシャトル
航空・宇宙 ALFLEX(小形自動着陸実験機)
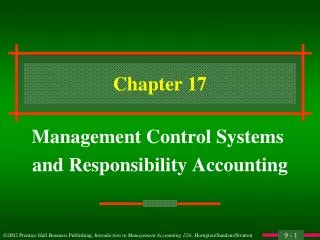
ロボット QRIO(SONY) ASIMO(HONDA) PINO (科学技術振興事業団) HOAP-3(富士通研究所)
部屋の自動温度調節 設定温度 熱量 室温 比較 エアコン 部屋 センサ 図 1.1 部屋の自動温度調節
オートパイロット 目標の 進行方向 操舵角 進行方向 比較 船舶 コントローラ センサ
天体望遠鏡 ハッブル宇宙望遠鏡
種々の対象システムから,制御に関連する特性を数学的種々の対象システムから,制御に関連する特性を数学的 モデルという形で抽出し,このモデルに基づいてシステム の挙動を解析し,制御系の設計理論を組み立てる. 対象システム 1 数学的モデル 対象システム 2 システム解析 制御系設計 対象システムn 制御工学 図 1.5 個々のシステムと制御目的
第 1 章 : 序論 1.1 制御とは 制御(コントロール),システム キーワード : 1.2 制御系の標準的構成と制御目的 フィードフォワード,フィードバック キーワード : 1.3 フィードバック制御の利点と課題 キーワード : フィードバック制御の利点 「制御」の重要性を理解する.また.フィード バック制御の利点を理解する. 学習目標 :
[例] 外気温 (外乱) 日照 など 室温機 からの熱 温度 部屋 (操作量) (制御量) 1 序論 1.2 制御の構成と制御目的 システムの表し方 ブロック線図 外乱 入力 出力 制御対象 図 1.6 制御対象のブロック 線図表現
外乱 外乱 目標値 制御量 制御量 操作量 操作量 コントローラ(制御器) 目標値と制御量の比較 偏差というオンライン情報 に基づき処理 制御対象 制御対象 制御器 制御器 センサ コントローラ(制御器) 目標値 対象の特性が分かって いれば,逆算 フィードバック 図 1.7 フィードバック制御系 フィードフォワード 図 1.8 フィードフォワード制御系
フィードバック制御の利点 • 制御対象の安定化 • 目標値追従 • 外乱の影響の抑制 • 特性変動による影響の抑制
自動制御 担当教員:藤田政之 教授 開講期:通年 単位数:2単位 区分:必修 教科書:杉江俊治, 藤田政之, 「フィードバック制御入門」, コロナ社, 1999 参考書: 大須賀公一, 足立修一, 「システム制御へのアプローチ」, コロナ社, 1999 示村悦二郎, 「自動制御とは何か」, コロナ社, 1990
成績評価:小テスト(20%)レポート(20%) 中間試験(30%), 期末試験(30%) Office Hour:月曜日 (16:50~18:00) 電気環境棟3F 河合教員室 URL:http://k-lab.e.ishikawa-nct.ac.jp/ E-mail:y_kawai@scl.ec.t.kanazawa-u.ac.jp
1 序論 1.3 フィードバック制御の利点と課題 [ 例 ] 水中ビークル • モータに加える電流 [A] に • 比例した速度 [m/s] ( 電流 [A] に対して,速度 [m/s] が出るとする ) • 進行方向と反対向きに [m/s]の速度の水流 • 目標速度 [m/s]
2 の逆数 と選ぶ に を代入 のとき, フィードフォワード
大 のとき とすると フィードバック
[ 外乱 ] 目標値: 外乱: フィードバック フィードフォワード のとき のとき 目標値から 40 % のずれ 目標値からの誤差が 1 % 以内
[ 特性変動 ] 特性が 30 % 劣化: ( 電流 1 [A] に対して,速度 1.4 [m/s]に劣化 ) フィードフォワード フィードバック のとき のとき 目標値から 30 % のずれ 目標値からの誤差が 1 % 以内
フィードバック制御の利点 • 制御対象の安定化 • 目標値追従 • 外乱の影響の抑制 • 特性変動による影響の抑制
第 1 章 : 序論 1.1 制御とは 制御(コントロール),システム キーワード : 1.2 制御系の標準的構成と制御目的 フィードフォワード,フィードバック キーワード : 1.3 フィードバック制御の利点と課題 キーワード : フィードバック制御の利点 「制御」の重要性を理解する.また.フィード バック制御の利点を理解する. 学習目標 :