Understanding CPU Architecture and Bus Systems in Computer Organization
810 likes | 939 Views
This chapter delves into the fundamentals of the CPU, highlighting its primary components: the datapath and control unit. It outlines the function of registers, the arithmetic-logic unit (ALU), and the significance of the control unit in executing instructions. The chapter also covers bus systems that facilitate data sharing among various computer components, detailing data, address, and control buses. It explains bus architectures, including single, multiple, and traditional ISA buses, and discusses issues like bus arbitration and performance.

Understanding CPU Architecture and Bus Systems in Computer Organization
E N D
Presentation Transcript
Cosc 2150:Computer Organization Chapter 4: CPU
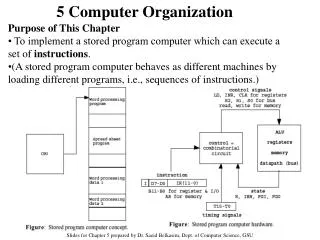
CPU Basics • The computer’s CPU fetches, decodes, and executes program instructions. • The two principal parts of the CPU are the datapath and the control unit. • The datapath consists of an arithmetic-logic unit and storage units (registers) that are interconnected by a data bus that is also connected to main memory. • Various CPU components perform sequenced operations according to signals provided by its control unit.
CPU Basics • Registers hold data that can be readily accessed by the CPU. • They can be implemented using D flip-flops. • A 32-bit register requires 32 D flip-flops. • The arithmetic-logic unit (ALU) carries out logical and arithmetic operations as directed by the control unit. • The control unit determines which actions to carry out according to the values in a program counter register and a status register.
The Bus • The CPU shares data with other system components by way of a data bus. • A bus is a set of wires that simultaneously convey a single bit along each line. • Two types of buses are commonly found in computer systems: point-to-point, and multipoint buses. These are point-to-point buses:
The Bus (2) • Buses consist of data lines, control lines, and address lines. • While the data lines convey bits from one device to another, control lines determine the direction of data flow, and when each device can access the bus. • Address lines determine the location of the source or destination of the data. • Different type of connection for different type of unit • Memory • Input/Output • CPU
Memory Connection • Receives and sends data • Receives addresses (of locations) • Receives control signals • Read • Write • Timing
Input/Output Connection(1) • Similar to memory from computer’s viewpoint • Output • Receive data from computer • Send data to peripheral • Input • Receive data from peripheral • Send data to computer
Input/Output Connection(2) • Receive control signals from computer • Send control signals to peripherals • e.g. spin disk • Receive addresses from computer • e.g. port number to identify peripheral • Send interrupt signals (control)
CPU Connection • Reads instruction and data • Writes out data (after processing) • Sends control signals to other units • Receives (& acts on) interrupts
Buses • There are a number of possible interconnection systems • Single and multiple BUS structures are most common • e.g. Control/Address/Data bus (PC) • e.g. Unibus (DEC-PDP)
What is a Bus? • A communication pathway connecting two or more devices • Usually broadcast • Often grouped • A number of channels in one bus • e.g. 32 bit data bus is 32 separate single bit channels • Power lines may not be shown
Data Bus • Carries data • Remember that there is no difference between “data” and “instruction” at this level • Width is a key determinant of performance • 8, 16, 32, 64 bit
Address bus • Identify the source or destination of data • e.g. CPU needs to read an instruction (data) from a given location in memory • Bus width determines maximum memory capacity of system • e.g. 8080 has 16 bit address bus giving 64k address space
Control Bus • Control and timing information • Memory read/write signal • Interrupt request • Clock signals
Big and Yellow? • What do buses look like? • Parallel lines on circuit boards • Ribbon cables • Strip connectors on mother boards • e.g. PCI • Sets of wires
Single Bus Problems • Lots of devices on one bus leads to: • Propagation delays • Long data paths mean that co-ordination of bus use can adversely affect performance • If aggregate data transfer approaches bus capacity • Most systems use multiple buses to overcome these problems
ISA bus • ISA (Industrial Standard Architecture) • First Open system bus architecture for PCs • 8 bit and 16 bit buses • 8 bit • 4.77 MHz, 20 address lines (1M address space) • 16 bit (introduced with the 286) • 8.33 MHz, 24 address lines (16M address space) • EISA (Extended ISA) • Introduced in 88-89 • 16/32 bit data lines, 24/32 bit address, 8.33MHz • Backward compatible with ISA, roughly twice the space of ISA
Bus Types • Dedicated • Separate data & address lines • Multiplexed • Shared lines • Address valid or data valid control line • Advantage - fewer lines • Disadvantages • More complex control • Ultimate performance
Bus Arbitration • More than one module controlling the bus • e.g. CPU and DMA controller • Only one module may control bus at one time • Arbitration may be centralised or distributed
Centralised or Distributed Arbitration • Centralised • Single hardware device controlling bus access • Bus Controller • Arbiter • May be part of CPU or separate • Distributed • Each module may claim the bus • Control logic on all modules
Timing • Co-ordination of events on bus • Synchronous • Events determined by clock signals • Control Bus includes clock line • A single 1-0 is a bus cycle • All devices can read clock line • Usually sync on leading edge • Usually a single cycle for an event
PCI Bus • Peripheral Component Interconnection • Intel released to public domain • 33/100/133/266/333+ MHz clock, independent of processor • 32 or 64 bit data and address lines (128 bit soon) • 50 lines • Supports up to 16 slots and ISA slots • Normally, 2 ISA slot, 1 of which is a “shared” slot with PCI • PCI Express x16 adapters and PCI Express x1 adapters
PCI examples • PCI 32 bit slot • AGP slot • PCI Express x16 slot • PCI Express x1 slot
PCI Bus Lines (required) • Systems lines • Including clock and reset • Address & Data • 32 time mux lines for address/data • Interrupt & validate lines • Interface Control • Arbitration • Not shared • Direct connection to PCI bus arbiter • Error lines
PCI Bus Lines (Optional) • Interrupt lines • Not shared • Cache support • 64-bit Bus Extension • Additional 32 lines • Time multiplexed • 2 lines to enable devices to agree to use 64-bit transfer
PCI Commands • Transaction between initiator (master) and target • Master claims bus • Determine type of transaction • e.g. I/O read/write • Address phase • One or more data phases
Clocks • Every computer contains at least one clock that synchronizes the activities of its components. • A fixed number of clock cycles are required to carry out each data movement or computational operation. • The clock frequency, measured in megahertz or gigahertz, determines the speed with which all operations are carried out. • Clock cycle time is the reciprocal of clock frequency. • An 800 MHz clock has a cycle time of 1.25 ns.
Clocks (2) • Clock speed should not be confused with CPU performance. • The CPU time required to run a program is given by the general performance equation: • We see that we can improve CPU throughput when we reduce the number of instructions in a program, reduce the number of cycles per instruction, or reduce the number of nanoseconds per clock cycle. We will return to this important equation in later chapters.
The Input/Output Subsystem • A computer communicates with the outside world through its input/output (I/O) subsystem. • I/O devices connect to the CPU through various interfaces. • I/O can be memory-mapped-- where the I/O device behaves like main memory from the CPU’s point of view. • Or I/O can be instruction-based, where the CPU has a specialized I/O instruction set. We study I/O in detail in chapter 7.
Memory Organization • Computer memory consists of a linear array of addressable storage cells that are similar to registers. • Memory can be byte-addressable, or word-addressable, where a word typically consists of two or more bytes. • Memory is constructed of RAM chips, often referred to in terms of length width. • If the memory word size of the machine is 16 bits, then a 4M 16 RAM chip gives us 4 megabytes of 16-bit memory locations.
Memory Organization • How does the computer access a memory location corresponds to a particular address? • We observe that 4M can be expressed as 2 2 2 20 = 2 22 words. • The memory locations for this memory are numbered 0 through 2 22 -1. • Thus, the memory bus of this system requires at least 22 address lines. • The address lines “count” from 0 to 222 - 1 in binary. Each line is either “on” or “off” indicating the location of the desired memory element.
Memory Organization • Physical memory usually consists of more than one RAM chip. • Access is more efficient when memory is organized into banks of chips with the addresses interleaved across the chips • With low-order interleaving, the low order bits of the address specify which memory bank contains the address of interest. • Accordingly, in high-order interleaving, the high order address bits specify the memory bank. The next slide illustrates these two ideas.
Memory Organization Low-Order Interleaving High-Order Interleaving
Memory Organization • Example: Suppose we have a memory consisting of 16 2K x 8 bit chips. • Memory is 32K = 25 210 = 215 • 15 bits are needed for each address. • We need 4 bits to select the chip, and 11 bits for the offset into the chip that selects the byte.
Memory Organization • In high-order interleaving the high-order 4 bits select the chip. • In low-order interleaving the low-order 4 bits select the chip.
Data Flow (Instruction Fetch) • Depends on CPU design • In general: • Fetch • PC contains address of next instruction • Address moved to MAR • Address placed on address bus • Control unit requests memory read • Result placed on data bus, copied to MBR, then to IR • Meanwhile PC incremented by 1 • IR is examined
Indirect Cycle • Added to fetch • May require memory access to fetch operands • Indirect addressing requires more memory accesses • Can be thought of as additional instruction subcycle The next slide shows a flowchart of this process.
Data Flow (Data Fetch) • If indirect addressing, indirect cycle is performed • Right most N bits of MBR transferred to MAR • Control unit requests memory read • Result (address of operand) moved to MBR
Data Flow (Execute) • May take many forms • Depends on instruction being executed • May include • Memory read/write • Input/Output • Register transfers • ALU operations • In other words: • do what the instruction says to do.