Wavefront Sensing II
790 likes | 1.05k Views
Wavefront Sensing II. Richard Lane Department of Electrical and Computer Engineering University of Canterbury. Contents. Session 1 – Principles Session 2 – Performances Session 3 – Wavefront Reconstruction. Session 2 Performances. Geometrical wavefront sensing take 2 The inverse problem

Wavefront Sensing II
E N D
Presentation Transcript
Wavefront Sensing II Richard Lane Department of Electrical and Computer Engineering University of Canterbury
Contents • Session 1 – Principles • Session 2 – Performances • Session 3 – Wavefront Reconstruction
Session 2 Performances • Geometrical wavefront sensing take 2 • The inverse problem • The astronomical setting • The basic methods
Geometric wavefront sensing(or curvature sensing without curvature) Plane 1 Image Plane Plane 2 Improve sensitivity (signal stronger) Improve the number of modes measurable (signal weaker)
W(x) z x Geometric optics model • Slopes in the wave-front causes the intensity distribution to be stretched like a rubber sheet • Aim is to map the distorted • distribution back to uniform
Geometric wavefront sensingTake 2 Intensity Plane 1 Plane 1 Image Plane Intensity Plane 2 Plane 2 Intensity distribution gives the probability distribution For the photon arrival
Difference gives a slope estimate Final slope estimate Recovering the phase Intensity Plane 1 Integrate to Form CDF Intensity Plane 2 Choose level Probability density functions Integrate slope to find the phase Defocus!
InverseProblem Performance is determined by amount of photons entering the aperture and assumptions about the object and turbulence
Multiple layers For wide angle imaging we need to know the height of the turbulence Layer 1 h1 h2 Layer 2 Aperture Plane
The fundamental problem: How to optimally estimate the optical effects of turbulence from a minimal set of measurements
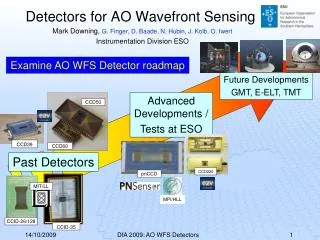
Limiting Factors • Technological • CCD read noise • Design of wavefront sensor (Curvature, Shack-Hartmann, Phase Diversity) • Fundamental • Photon Noise • Loss of information in measurements • Quality of prior knowledge
In Its Raw Form the Inverse Problem Is Always Insoluble • There are always an infinite number of ways to explain data. • The problem is to explain the data in the most reasonable way • Example Shack-Hartmann sensing for estimating turbulence
Example – fit a curve to known slopes • Solution requires assumptions on the nature of the turbulence • Use a limited set of basis functions • Assume Kolmogorov turbulence or smoothness
Parameter estimation • Essentially we need to find a set of unknown parameters which describe the object and/or turbulence • The parameters can be in terms of pixels or coefficients of basis functions • Solution should not be overly sensitive to our choice of parameters. • Ideally it should be on physical grounds
Bayesian estimation 101An important problem • Estimate • And if you know that it models two people splitting the bill in a restaurant?
Possible phase functionsZernike basis Δ Zernike Polynomials Low orders are smooth Pixel basis, highest frequency = 1/(2Δ)
Estimation using Zernike polynomials Measurement Interaction Zernike Polynomial vector matrix Coefficents phase weighting Zernikie polynomial • ith column of Θ corresponds to the measurement that would occur if the phase was the ith Zernike polynomial
Extension to many modes • Provided the set of basis functions is complete, the answer is independent of the choice • The best functions are approximately given by the eigenfunctions of the covariance matrix C • These approximate the low order Zernike polynomials, hence their use. • Conventional approach is to use a least squares solution and estimate only the first M Zernikes when M ≈N/2 (N is the number of measurements)
Ordinary least squares • Minimise Weighted least squares • Not all measurements are equally noisy • hence minimise
Conventional Results • As the number M increases the wavefront error decreases then increases as M approaches N. • Reason when M=N there is no error and there should be as higher order modes exist and will be affecting the measurements
Phase estimation from the centroid • Tilt and coma both produce displacement of the centroid • According to Noll for Kolmogorov turbulence • Variance of the tilt • Variance of the coma Ideally you should estimate a small amount of coma
Bayesian viewpoint • The problem in the previous slide is that we are not modelling the problem correctly • Assuming that the higher order modes are zero, is forcing errors on the lower order modes • Need to estimate the coefficients of all the modes as random variables
Example of Bayesian estimation for underdetermined equations • Measurement z is a linear function of two unknowns x,y • The estimate (denoted by ^) is a linear • function of z • We want to minimise the expected error Statistical expectation
Minimisation of the error • Key step, rewrite in terms of and • Solution is a function of the covariance of the unknown • parameters
Vector solution for the phase • Express the phase as a sum of orthogonal basis functions • Observed measurements are a linear function of the coefficients • Reconstructor depends on the covariance of a
Simple example for tilt D/r0=4 • From Noll • From Primot et al
Bayesian estimate of the wavefront Minimizes
Summary Bayesian method • When the data is noisy you need to put more emphasis on the prior. • For example, if the data is very bad, don’t try and estimate a large number of modes • When done properly the result does not depend strongly on C being exact • Error predicted to be where
Operation of a Bayesian estimator • Minimizes • When D becomes very large, the data is very noisy then more weight is placed on the prior data prior • Ultimately as D→∞, a→0 (for very noisy data no estimate is made)
Bayesian examination question • You are on a game show. • You can select one of three doors • Behind one door is $10000, behind the others nothing • After you select a door, the compere then opens one of the other doors revealing nothing. • You are given the option to change your choice • Should you?
Estimating the performance limits when it is non-Gaussian • The preceding analysis is fine when the measurement errors can be modelled as a Gaussian random variable • On many equations you need to perform an analysis to work out the error in the analysis • Cramer-Rao bounds
Cramer-Rao bound • Linear unbiased estimators only • Essentially the quality of the parameter estimate is given by the curvature of the pdf • Doesn’t tell you how to achieve the bound
Simple example • Find the performance limit estimating the mean of a one-dimensional Gaussian from 1 sample
Points to note • Limit is a lower bound. Clearly for 1 sample from the pdf it cannot be attained • The variance decays as 1/N with more samples • For a Gaussian asymptotically the centroid of the distribution can be shown to approach the Cramer-Rao bound
Estimation of a laser guidestar location, Cramer-Rao bound Small projection telescope Large AO corrected projection telescope Large uncorrected projection telescope Key points: In the presence of saturation a focused spot may not be optimal Need to know the pattern to reach the limit
Optimal estimation of a parameterwavefront tilt • Important because the wavefront tilt is the dominant form of phase aberration • A small error in estimating the tilt can be larger than the full variance of a higher order aberration.
Issues • Displacement of the centroid of an image is proportional to the average tilt (not the least mean square) of the phase distortion • Will discuss this issue later, but for the moment concentrate on estimating the mean square tilt.
How do you estimate the centre of a spot? • The performance of the Shack-Hartmann sensor depends on how well the displacement of the spot is estimated. • The displacement is usually estimated using the centroid (center-of-mass) estimator. • This is the optimal estimator for the case where the spot is Gaussian distributed and the noise is Poisson.
Why Not Use the Centroid? • In practice the spot intensity decays as • This means that photons can still occur at points quite distant from the centre. • Estimator is divergent unless restricted to a finite region in the image plane
Diffraction-limited spot • For a square aperture, the distribution is:
Solutions (1) • Use a quad cell detector and discard the photons away from the centre • The signal from the outer cells is discarded because it adds too much noise
Solutions 2 • Use an optimal estimator that weights the information appropriately • Consider two measurements of an unknown parameter an estimate of a parameter with different variances • A weighted sum is always a better estimator • A non linear estimator is better still
Maximum-likelihood estimation • If photons are detected at x1, x2…, xN, the estimate is the value that maximizes the expression • The Cramer-Rao lower bound for the variance is • For a large number of photons, N, the variance approaches the Cramer-Rao lower bound.
Centroid location by model fitting • Technique relies on finding a model of the object • Not sensitive to the size of window (unlike the centroid) • Centroid is a closed form solution for fitting a Gaussian of variable width
Tilt estimation in curvature sensing • The image is displaced by the atmospheric tilt, how well you can estimate it is determined by the shape of the image formed.
Tilt estimation in the curvature actual propagated wavefronts