CHAPTER
CHAPTER. 19. 非線性系統的模糊控制 Ⅰ :順滑控制. 19.1 模糊控制當成順滑控制. 19.1.1 順滑控制的基本原理 (19.1) (19.2) (19.3) (19.4). 19.1 模糊控制當成順滑控制. (19.5) (19.6) (19.7) (19.8). 19.1 模糊控制當成順滑控制. 19.1 二維相位平面的順滑面. 引理 19.1. 考慮非線性系統 (19.1) 並且令 s ( x , t ) 定義在 (19.5) 。如果我們能設計控制器 u 使得順滑條件 (19.8) 滿足,則:

CHAPTER
E N D
Presentation Transcript
CHAPTER 19 非線性系統的模糊控制Ⅰ:順滑控制
19.1 模糊控制當成順滑控制 • 19.1.1 順滑控制的基本原理 (19.1) (19.2) (19.3) (19.4)
19.1 模糊控制當成順滑控制 (19.5) (19.6) (19.7) (19.8)
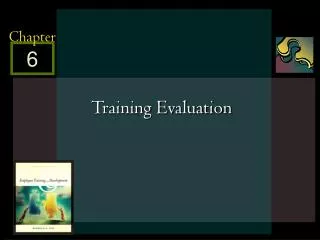
19.1 模糊控制當成順滑控制 19.1二維相位平面的順滑面
引理 19.1 • 考慮非線性系統(19.1) 並且令s(x,t)定義在(19.5)。如果我們能設計控制器u使得順滑條件(19.8) 滿足,則: • (a) 狀態將達到順滑面S(t)在有限的時間。 • (b) 一旦狀態在順滑面,它將保留在上面。 • (c) 如果狀態保留在順滑面,追蹤誤差e(t)將收斂到0。
19.1 模糊控制當成順滑控制 (19.9) (19.10) (19.11) (19.12) (19.13)
19.1 模糊控制當成順滑控制 • 19.1.2 根據順滑控制原則的模糊控制器分析 • 我們現在利用順滑控制原則去分析模糊控制器。為了簡化我們考慮n=2的系統(19.1);但是處理方法可被一般化為高階系統。假設我們選取控制u為模糊控制器ufuzz(x),也就是 (19.14) 下列定理滿足模糊控制器ufuzz(x)條件使得追蹤誤差e收斂到0。
定理 19.1 • 考慮具有n=2的非線性系統(19.1) 並且假設控制u給予在 (19.14)。如果模糊控制器ufuzz(x)滿足下列條件: (19.15) (19.16) 其中η與λ為正的常數並且,則它保證追蹤誤差 將收斂到0。
定理 19.1 • 證 明 • 將(19.14) 代入順滑條件(19.9),我們得到 (19.17) 很清楚地如果ufuzz(x) 滿足(19.15) 與(19.16),則(19.17) 為真,而其意味著順滑條件(19.8) 滿足,因此根據引理19.1追蹤誤差將收斂到0。
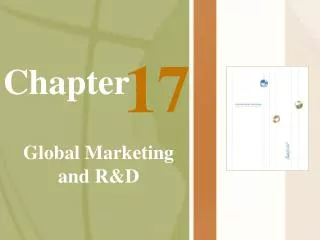
19.2 模糊控制當成順滑控制:設計 • 19.2.1 順滑控制律的連續近似 • 由最後一節中我們看到順滑控制律(例如(19.10))在越過順滑面S(t)必為不連續。因此控制切換的實現無法完美並且我們在數位控制系統中必須取樣訊號,這將導致切跳(chattering),如圖19.2。因為切跳包含有高控制活動並且可能激發高頻動態以致於是不想要的。一種方式去消除切跳是引入窄的邊界層鄰接順滑面: (19.18) 使得在這個邊界層內控制為連續變化;參閱圖19.2。
19.2 模糊控制當成順滑控制:設計 19.2切跳與邊界層
引理 19.2 • 如果順滑條件(19.8) 在(19.8) 的邊界層B(t)外部滿足,則它在有限時間之後能保證,我們將得到 (19.19)
引理 19.2 • 證 明 (19.20) (19.21) (19.22) (19.23) (19.24)
引理 19.2 (19.25) (19.26) (19.27)
19.2 模糊控制當成順滑控制:設計 • 我們能夠設計平滑控制器而不需要在越過順滑面時不連續切換。特別是對二階系統來說,我們改變控制律(19.10) 為 (19.28) 其中飽和函數sat(s/Φ)定義為 (19.29)
定理 19.2 • 考慮具有n=2的非線性系統(19.1) 並且假設控制u為模糊控制器ufuzz。如果模糊控制器設計為 (19.30) 則在有限時間之後追蹤誤差e(t)=x(t)-xd(t)將滿足(19.19)。
19.2 模糊控制當成順滑控制:設計 • 模糊控制器的設計 • 步驟1 決定e與的討論範圍;也就是決定區間[α1,β1]與[α2,β2]使得 。 • 步驟2 令並且視這個如同(10.9) 的g。透過10.2或11.1節中三個步驟設計模糊控制器;也就是所設計的模糊控制器為模糊系統(10.10)。
範例 19.1 考慮一階非線性系統 (19.31) 其中非線性函數假設為未知。我們的工作是根據平滑順滑控制律去設計模糊控制器使得x(t)收斂到零。 因此 (19.32)
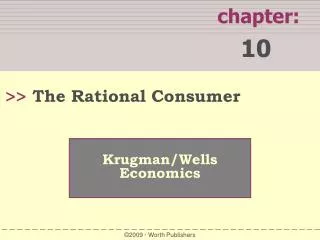
範例 19.1 我們選取 以及F(x)=2以便 。在這個範例中, 以及順滑條件 (19.8) 變為 (19.33) 因此順滑控制律為 (19.34) 其中K(x)=η+F(x)=η+2。圖19.3顯示在四種初始條件下利用這個順滑控制器的閉迴路狀態x(t),其中我們選取η=0.1以及取樣率等於0.02秒。我們看到切跳產生。
範例 19.1 平滑順滑控制器為 (19.35) 視這個usm(x)如同(10.9) 式中的g(x),我們跟隨11.1節中的三個步驟來設計模糊控制器(這是一個一維系統,11.1節中的特別狀況下系統),其中我們選取Φ=0.2,U=[-2,2],N=9 並且ej均勻分佈於[-2,2]。圖19.4顯示如圖19.3中相同初始條件下具有這個模糊控制器的閉迴路狀態x(t)。比較圖19.4與19.3,我們看到切跳消失,但是穩態追蹤誤差出現;這是被期待的:切跳是平滑的但是犧牲精確度。
範例 19.1 19.3對於四種不同初始條件下非線性系統(19.31) 具有順滑控制器(19.34) 的閉迴路狀態x(t)。
範例 19.1 19.4對於四種不同初始條件下非線性系統(19.31) 具有模糊控制器的閉迴路狀態x(t)。
19.3 總結與更多的閱讀 • 對非線性系統如何去設計滑動控制器並且基本的假設為何。 • 什麼是切跳並且如何去平滑它(介於追蹤精密度與平滑的平衡)。 • 如何根據平滑順滑控制律設計模糊控制器。