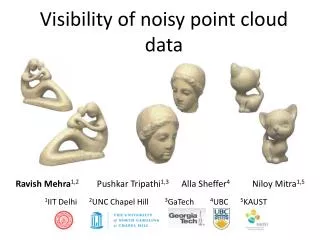
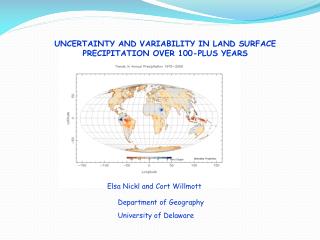
Uncertainty and Variability in Point Cloud Surface Data
Uncertainty and Variability in Point Cloud Surface Data. Mark Pauly 1,2 , Niloy J. Mitra 1 , Leonidas J. Guibas 1. 1 Stanford University. 2 ETH, Zurich. Point Cloud Data (PCD). To model some underlying curve/surface. Sources of Uncertainty. Discrete sampling of a manifold

Uncertainty and Variability in Point Cloud Surface Data
E N D
Presentation Transcript
Uncertainty and Variability in Point Cloud Surface Data Mark Pauly1,2, Niloy J. Mitra1, Leonidas J. Guibas1 1 Stanford University 2 ETH, Zurich
Point Cloud Data (PCD) To model some underlying curve/surface
Sources of Uncertainty • Discrete sampling of a manifold • Sampling density • Features of the underlying curve/surface • Noise • Noise characteristics
Uncertainty in PCD Reconstruction algorithm PCD curve/ surface But is this unique?
A possible reconstruction Motivation
or this one, Motivation
or this ….. Motivation
So look for probabilistic answers. Motivation priors !
What are our Goals? • Try to evaluate properties of the set of (interpolating) curves/surfaces. • Answers in probabilistic sense. • Capture the uncertainty introduced by point representation.
Related Work • Surface reconstruction • reconstruct the connectivity • get a possible mesh representation • PCD for geometric modeling • MLS based algorithms • Kalaiah and Varshney • PCA based statistical model • Tensor voting
Likelihood that a surface interpolating P passes though a point x in space Set of all interpolating surfaces for PCD P Prior for a surface S in MP Notations
Expected Value Conceptually we can define likelihood as Surface prior ? Set of all interpolating surfaces ? Characteristic function
How to get FP(x) ? • input : set of points P • implicitly assume some priors (geometric) • General idea: • Each point piP gives a local vote of likelihood • 1.Local likelihood depends on how well neighborhood of piagrees with x. • 2. Weight of vote depends on distance of pi from x.
x x Estimates for x Interpolating curve more likely to pass through x Prior : preference to linear interpolation
x qi(x) qi(x) x pi pj pi pj Estimates for x
Likelihood Estimate by pi Distance weighing High if x agrees with neighbors of pi
Likelihood Estimates Normalization constant
Finally… O(N) O(1) Covariance matrix (independent of x !)
Likelihood Map: Fi(x) likelihood Estimates by point pi
Likelihood Map: Fi(x) Pinch point is pi High likelihood Estimates by point pi
Likelihood Map: Fi(x) Distance weighting
Likelihood Map: FP(x) likelihood O(N)
Confidence Map • How much do we trust the local estimates? • Eigenvalue based approach • Likelihood estimates based on covariance matrices Ci • Tangency information implicitly coded in Ci
Confidence Map denote the eigenvalues of Ci. Low value denotes high confidence (similar to sampling criteria proposed by Alexa et al. )
Confidence Map confidence Red indicates regions with bad normal estimates
Maps in 2d Likelihood Map Confidence Map
Confidence Map Likelihood Map Maps in 3d
Noise Model • Each point pi corrupted with additive noise i • zero mean • noise distribution gi • noise covariance matrix i • Noise distributions gi-s are assumed to be independent
Noise Expected likelihood map simplifies to a convolution. Modified covariance matrix convolution
Likelihood Map for Noisy PCD gi No noise With noise
Scale Space Proportional to local sampling density
Scale Space Good separation Bad estimates in noisy section
Scale Space Cannot detect separation Better estimates in noisy section
Application 1: Most Likely Surface Noisy PCD Likelihood Map
Application 1: Most Likely Surface Active Contour Sharp features missed?
Application 2: Re-sampling Given the shape !! Confidence map Add points in low confidence areas
Application 2: Re-sampling Add points in low confidence areas
Application 3: Weighted PCD PCD 1 PCD 2
Application 3: Weighted PCD Merged PCD
Application 3: Weighted PCD Merged PCD Too noisy Too smooth
Application 3: Weighted PCD Confidence Map Likelihood Map
Application 3: Weighted PCD Weighted PCD
Application 3: Weighted PCD Weighted PCD Merged PCD
Future Work • Soft classification of medical data • Analyze variability in family of shapes • Incorporate context information to get better priors • Statistical modeling of surface topology