Download
1 / 27
280 likes | 409 Views
任务 8 :直流电机的 PWM 调速控制. 工作任务描述: 通过调节实验箱上的电位器旋钮输入模拟量,单片机控制输出脉冲的脉宽,从而控制直流电动机的转速。. 学习内容:. 一、 A/D 转换器的主要性能指标及分类 二、并行 ADC0809 芯片的引脚功能 三、单片机与 ADC0809 的典型连线与编程 四、常用开关量的驱动方法及单片机系统隔离方法 五、 PWM 控制. 模数转换器接口( A/D ). 一、 A/D 转换器的主要性能指标及分类 1 、 A/D 转换器的主要性能指标. 上图描述了 A/D 转换的过程 ( 1 )转换精度

E N D
任务8:直流电机的PWM 调速控制 微型计算机控制技术
工作任务描述: 通过调节实验箱上的电位器旋钮输入模拟量,单片机控制输出脉冲的脉宽,从而控制直流电动机的转速。 微型计算机控制技术
学习内容: 一、A/D转换器的主要性能指标及分类 二、并行 ADC0809芯片的引脚功能 三、单片机与ADC0809的典型连线与编程 四、常用开关量的驱动方法及单片机系统隔离方法 五、PWM控制 微型计算机控制技术
模数转换器接口(A/D) 一、A/D转换器的主要性能指标及分类 1、A/D转换器的主要性能指标 微型计算机控制技术
上图描述了A/D转换的过程 • (1)转换精度 • 通常用分辨率和量化误差来描述 • (2)分辨率:分辨率=UREF/2N,表示输出数字量变化一个相邻数码所需输入模拟电压的变化量。 • (3)量化误差:是指零点和满度校准后,在整个转换范围内的最大误差,通常是已相对误差的形式出现。以LSB为单位,如8位A/D转换器基准电压为5V时,1LSB≈20mv,量化误差±1LSB/2≈±10mv • (4)转换时间 • 指A/D转换器转换完一次A/D转换所需时间,时间越短,表示适应输入信号快速变化能力越强。 • 按照信号传输形式分为:并行A/D和串行A/D 微型计算机控制技术
2、A/D转换器的分类 • 按照转换原理分位:逐次逼近式、双积分式、V/F变换式 微型计算机控制技术
3、ADC0809的芯片引脚及主要性能指标 主要性能: 分辨率 8 位; 转换时间100s; 温度范围-40 ~+85 ℃; 可使用单一的 +5V电源; 可直接与CPU连接; 输出带锁存器; 逻辑电平与TTL兼容。 微型计算机控制技术
OE ADC0809有28条引脚。 微型计算机控制技术
ADC0809共有28个引脚,其主要引脚信号为: START—为起动模/数转换引脚,当START=1时,开始起动模/数转换。 EOC—为模/数转换结束引脚 ,转换结束,该引脚输出高电平。 OE—为输出允许控制,该引脚用于控制选通三态门。当OE=1时三态门打开,模/数转换后 得到的数字量才可通过三态门到达数据总线,进而被读入CPU。 CLOCK——为外加时钟输入引脚,其频率为50-800KHZ,使用时常接500-600KZ。 ALE——为模拟通道锁存信号,当此引脚由低电平到高电平跳变时将加到C,B,A 引脚的 数据锁存并选通相应的模拟通道。 微型计算机控制技术
三、单片机与ADC0809的典型连线与编程 可以用中断、查询和延时等待三种方式编制程序。 1、中断方式 将ADC0809的EOC端经过非门之后和单片机的外部中断0连接 微型计算机控制技术
2、查询方式 ADC0809的EOC端和P1.0相连。不断查询P1.0的状态即可得知A/D转换是否结束。 微型计算机控制技术
3、延时等待 ADC0809的EOC端不必和80C51相连接,而是根据时钟频率计算出A/D转换时间,略微延长后直接读取A/D转换值。(大于128us) 试比较三种方式,说出优缺点 微型计算机控制技术
4、ADC0809的应用 例:将单片机上0-5V的模拟信号进行A/D转换并将转换结果通过指示灯或者LED数码管进行显示,调节输入电压,能够从指示灯或者LED数码管上看到值的变化。 5、扩展知识: 串行A/D ADC0832及其接口电路 随着单片机技术的发展,串行接口电路得到越来越多的应用,A/D转换电路同单片机的接口电路除了并行扩展之外,还有串行连接方式。 微型计算机控制技术
四、常用开关量的驱动方法及单片机系统隔离方法四、常用开关量的驱动方法及单片机系统隔离方法 1、驱动发光二极管 常见发光二极管的驱动电流一般为5-10mA,而单片机的I/O口的输出电流一般为几十uA,加正向电压,导通之后的管压降为1-2V,单片机驱动二极管的典型电路如下图所示: 1)驱动端口可用P0-P3口中任意一端(P0口应加上拉电阻),输出低电平,LED亮,反之则暗。 2)驱动限流电阻R1可取10KΩ-100KΩ, 可视驱动三极管的β值而定,β值大, 则R1可略大。R1大,可减小流过80C51 的电流,降低功耗。 3)驱动晶体管VT,灌电流驱动时,应选取 PNP三极管,一般选取9014、9012.9014的 β值较大,Icm较小;9012的β值略小, Icm较大。 4)发光二极管VL限流电阻R2,可根据VL电流而定, VL电流一般取5-10mA,电流大,亮度高。 微型计算机控制技术
2、驱动继电器 • 驱动继电器主要考虑下列两个因素: • 1)继电器线圈额定电压。 • 若额定电压为5V、6V,按照图5-3-2连接,若额定电压大于6V,则按照图5-3-3连接,若额定电压为AC 220V,则应用光耦合器。 • 2)继电器线圈驱动电流。 • 一般来讲,额定电压低,驱动电流大,触电容量大,驱动电流大。可根据线圈驱动电流大小,选用有足够输出电流的晶体三极管,且三极管的β值要大,β值大时,80C51的驱动电流可小一些。需要指出的是要适当选取R1,R1过大,驱动电流不足,继电器会出现“颤抖”。 • 二极管VD的作用是防止换路时,继电器产生感应电压损坏晶体三极管 微型计算机控制技术
3、光电隔离接口 在单片机控制系统中,有时要将强电回路与单片机弱电供电回路隔离,以有效抑制强电干扰信号,常见的隔离方式是变压器耦合和光耦合,变压器耦合只能用于传送交变信号,且体积大、量重、功耗大,还会产生电磁干扰。光耦合技能用于传送交变信号,又能用于传送直流信号,且体积小、量轻、功耗小,抗干扰强。 光耦合器件有多种类型,最常用的是光敏二极管构成的光耦合器,下图是80C51与光耦合器的典型连接电路,试分析下列电路中,输出高低电平时,光耦合器的工作状态。 微型计算机控制技术
需要指出的是: • 1)光耦合器中的发光二极管驱动电流较大,应用晶体三极管或者有足够输出电流的门电路扩大80C51的输出电流 • 2)既然是隔离,强电回路的接地端与弱点回路的接地端不能连接在一起,否则隔离只是一句空话。 微型计算机控制技术
4、驱动晶闸管 晶闸管常用于单片机控制系统中交流强电回路的执行元件,一般来讲,据需要光耦合器隔离驱动,图5-3-5为驱动双向晶闸管典型应用电路。 微型计算机控制技术
为减小驱动功率和减小晶闸管触发时产生的干扰,用于交流电路双向晶闸管的触发常采用过零触发,因此上述电路还需要正弦交流过零检测电路,在过零时产生脉冲信号引发80C51中断,在中断服务子程序中发出晶闸管触发信号,并延时关断。这就增加了控制系统的复杂性,一种较为简单的方法是采用新型元件,图5-3-6为过零检测触发晶闸管电路,MOC3041能在正弦波交流过零时自动导通,触发大功率双向晶闸管导通。从而省去了过零检测及触发等辅助电路,并降低了材料成本,提高了可靠性。图中,R3为MOC3041触发限流电阻,R4为BCR门级电阻,防止误触发,提高抗干扰性。为减小驱动功率和减小晶闸管触发时产生的干扰,用于交流电路双向晶闸管的触发常采用过零触发,因此上述电路还需要正弦交流过零检测电路,在过零时产生脉冲信号引发80C51中断,在中断服务子程序中发出晶闸管触发信号,并延时关断。这就增加了控制系统的复杂性,一种较为简单的方法是采用新型元件,图5-3-6为过零检测触发晶闸管电路,MOC3041能在正弦波交流过零时自动导通,触发大功率双向晶闸管导通。从而省去了过零检测及触发等辅助电路,并降低了材料成本,提高了可靠性。图中,R3为MOC3041触发限流电阻,R4为BCR门级电阻,防止误触发,提高抗干扰性。 微型计算机控制技术
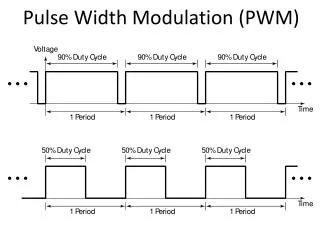
五、PWM控制 1、PWM介绍 PWM意为脉冲宽度调制,是通过控制固定电压的直流电源开关频率,改变负载两端的电压,从而达到控制要求的一种电压调整方法。PWM可以应用在很多方面,比如:电机调速、温度控制、压力控制等。 在PWM驱动控制的调整系统中,按一个固定的频率来接通和断开电源,并且根据需要改变一个周期内“接通”和“断开”时间的长短。通过改变直流电机电枢上电压的“占空比”来达到改变平均电压大小 目的,从而来控制电动机的转速。也正因为如此,PWM又被称为“开关驱动装置”。 微型计算机控制技术
2、PWM信号发生电路设计 PWM波可以由具有PWM输出的单片机通过编程来得以产生,也可以采用PWM专用芯片来实现,当PWM波的频率太高时,它对直流电机驱动的功率管要求太高,而当它的频率太低时,其产生的电磁噪声就比较大,在实际应用电路中,PWM波的频率在18khz左右时,效果最好。 微型计算机控制技术