Download
1 / 20
290 likes | 675 Views
INDUSTRIAL AUTOMATION. (Getting Started week -1). Contents. PID Controller. Implementation of PID Controller. Response under actuator Saturation. PID with Anti Reset windup. Tuning methods of PID Controller. PID controller. Consists of three modes: P roportional. I ntigral .

E N D
INDUSTRIAL AUTOMATION (Getting Started week-1)
Contents • PID Controller. • Implementation of PID Controller. • Response under actuator Saturation. • PID with Anti Reset windup. • Tuning methods of PID Controller.
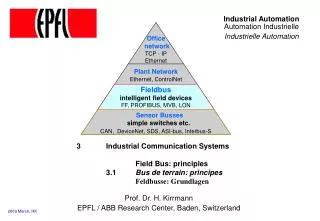
PID controller Consists of three modes: • Proportional. • Intigral. • Derivative.
PID Contd. • the output of the PID controller u(t) can be expressed in terms of the input e(t).
Basic terms related to PID • Kp: Proportional gain. PB: Proportional Band • Ki: Intigral gain = Kp/Ti • Kd: Derivative gain = Kp.Td where, Ti=Intigral Time :Time taken to repeat the proportional control for a step signal(min/repeat). Td=Derivative time: Time taken for the proportional term to equal the derivative term for a ramp signal.
Implementation of PID Controller • Integrator Windup under Actuator Saturation
Implementation Contd. • PID Controller with anti reset Windup.
Tuning of PID Controller • Involves selection of the proper values of Kc,Tau_I and Tau_d. • Best method, Ziegler-Nichols method of tuning. • the values of controller parameters that bring the closed-loop system to the verge of instability by 1. Simulation. 2. Root Locus Technique. 3. Direct substitution.
Contd. • Using Proportional only control, determine Kc = Ku (ultimate controller gain) • the period of the sustained oscillations Pu (ultimate period of oscillations). Pu= 2π/ωco If the Kc is increased the process dynamics goes through the following sequence of behaviour
Tuning methods Contd. By using the values of Ku and Pu, determine the other parameters of PID Controller. summarized as below.
Contd. • Dynamic changes as Kc is increased for a FOPDT process.
Controller Tuning In Time Domain • This is done by approx. model based on the Process Reaction Curve(open -loop).
Contd. • The other parameters of controller can be caluclated as folows.
Example • The given transfer function is as follows. By using SIMULINK/MATLAB. we can get the parametes of PID controller. By the Zeigler-Nichols method, the tuning of PID is done.
Example Contd • The characteristic eqn of the system is given by • By using the method of substitution , for P controller only calculate the Ultimate gain.
Example contd. By the measuring ultimate gain and ultimate period we can get the other parameters by Z-N method. Z-N tuning will be : P: Kc = 0.5Ku = 0.83 PI: Kc = 0.45Ku = 0.75; Tau_I = Pu /1.2 = 10.5 min PID: Kc = 0.6Ku = 1.0; Tau_I = Pu /2 = 6.3 min; Tau_D = Pu /8 = 1.6
Example contd. • Final Response for PID controller.