Efficient Solution Algorithms for Factored MDPs
Efficient Solution Algorithms for Factored MDPs . by Carlos Guestrin, Daphne Koller, Ronald Parr, Shobha Venkataraman. Presented by Arkady Epshteyn. Problem with MDPs. Exponential number of states Example: Sysadmin Problem 4 computers: M 1 , M 2 , M 3 , M 4

Efficient Solution Algorithms for Factored MDPs
E N D
Presentation Transcript
Efficient Solution Algorithms for Factored MDPs by Carlos Guestrin, Daphne Koller, Ronald Parr, Shobha Venkataraman Presented by Arkady Epshteyn
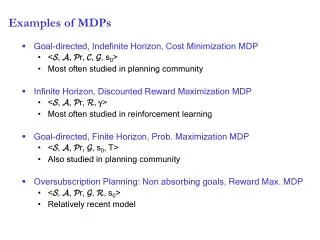
Problem with MDPs • Exponential number of states • Example: Sysadmin Problem • 4 computers: M1, M2 , M3 , M4 • Each machine is working or has failed. • State space: 24 • 8 actions: whether to reboot each machine or not • Reward: depends on the number of working machines
Factored Representation • Transition model: DBN • Reward model:
Approximate Value Function • Linear value function: • Basis functions: hi(Xi=true)=1 hi(Xi=false)=0 h0=1
Markov Decision Processes For fixed policy : The optimal value function V*:
Solving MDPMethod 1: Policy Iteration • Value determination • Policy Improvement • Polynomial in the number of states N • Exponential in the number of variables K
Solving MDPMethod 2: Linear Programming • Intuition: compare with the fixed point of V(x): • Polynomial in the number of states N • Exponential in the number of variables
Objective function • Objective function polynomial in the number of basis functions
Restricted Domain 1 2 3 • Backprojection - depends on few variables • Basis function • Reward function
Variable Elimination - similar to Bayesian Networks
Maximization as Linear Constraints • Exponential in the size of each function’s • domain, not the number of states
Approximate Value Function x1 h1: x3 0 5 0.6 Notice: compact representation (2/4 variables, 3/16 rules)
Summing Over Rules x2 h1(x) h2(x) x1 x1 x2 x1 = + u1+u4 x3 u5+u1 x3 x1 x3 u4 u1 u3+u4 u2+u4 u5 u6 u2 u3 u2+u6 u3+u6
Multiplying over Rules • Analogous construction
Rule-based Maximization x1 x1 Eliminate x2 x3 x2 u1 u1 u2 x3 max(u2,u3) max(u2,u4) u3 u4
Rule-based Linear Program • Backprojection, objective function – handled in a similar way • All the operations (summation, multiplication, maximization) – keep rule representation intact • is a linear function
Conclusions • Compact representation can be exploited to solve MDPs with exponentially many states efficiently. • Still NP-complete in the worst case. • Factored solution may increase the size of LP when the number of states is small (but it scales better). • Success depends on the choice of the basis functions for value approximation and the factored decomposition of rewards and transition probabilities.