Download
1 / 15
150 likes | 425 Views
Examples of MDPs. Goal-directed, Indefinite Horizon, Cost Minimization MDP < S , A , P r, C , G , s 0 > Most often studied in planning community Infinite Horizon, Discounted Reward Maximization MDP < S , A , P r, R , > Most often studied in reinforcement learning

E N D
Examples of MDPs Goal-directed, Indefinite Horizon, Cost Minimization MDP <S, A, Pr, C, G, s0> Most often studied in planning community Infinite Horizon, Discounted Reward Maximization MDP <S, A, Pr, R, > Most often studied in reinforcement learning Goal-directed, Finite Horizon, Prob. Maximization MDP <S, A, Pr, G, s0, T> Also studied in planning community Oversubscription Planning: Non absorbing goals, Reward Max. MDP <S, A, Pr, G, R, s0> Relatively recent model
MDPs don’t have a notion of an “initial” and “goal” state. (Process orientation instead of “task” orientation) Goals are sort of modeled by reward functions Allows pretty expressive goals (in theory) Normal MDP algorithms don’t use initial state information (since policy is supposed to cover the entire search space anyway). Could consider “envelope extension” methods Compute a “deterministic” plan (which gives the policy for some of the states; Extend the policy to other states that are likely to happen during execution RTDP methods SSSP are a special case of MDPs where (a) initial state is given (b) there are absorbing goal states (c) Actions have costs. All states have zero rewards A proper policy for SSSP is a policy which is guaranteed to ultimately put the agent in one of the absorbing states For SSSP, it would be worth finding a partial policy that only covers the “relevant” states (states that are reachable from init and goal states on any optimal policy) Value/Policy Iteration don’t consider the notion of relevance Consider “heuristic state search” algorithms Heuristic can be seen as the “estimate” of the value of a state. SSPP—Stochastic Shortest Path Problem An MDP with Init and Goal states
<S, A, Pr, C, G, s0> Define J*(s) {optimal cost} as the minimum expected cost to reach a goal from this state. J* should satisfy the following equation: Bellman Equations for Cost Minimization MDP(absorbing goals)[also called Stochastic Shortest Path] Q*(s,a)
<S, A, Pr, R, s0, > Define V*(s) {optimal value} as the maximum expected discounted reward from this state. V* should satisfy the following equation: Bellman Equations for infinite horizon discounted reward maximization MDP
<S, A, Pr, G, s0, T> Define P*(s,t) {optimal prob.} as the maximum probability of reaching a goal from this state at tth timestep. P* should satisfy the following equation: Bellman Equations for probability maximization MDP
Modeling Softgoal problems as deterministic MDPs • Consider the net-benefit problem, where actions have costs, and goals have utilities, and we want a plan with the highest net benefit • How do we model this as MDP? • (wrong idea): Make every state in which any subset of goals hold into a sink state with reward equal to the cumulative sum of utilities of the goals. • Problem—what if achieving g1 g2 will necessarily lead you through a state where g1 is already true? • (correct version): Make a new fluent called “done” dummy action called Done-Deal. It is applicable in any state and asserts the fluent “done”. All “done” states are sink states. Their reward is equal to sum of rewards of the individual states.
Use heuristic search (and reachability information) LAO*, RTDP Use execution and/or Simulation “Actual Execution” Reinforcement learning (Main motivation for RL is to “learn” the model) “Simulation” –simulate the given model to sample possible futures Policy rollout, hindsight optimization etc. Use “factored” representations Factored representations for Actions, Reward Functions, Values and Policies Directly manipulating factored representations during the Bellman update Ideas for Efficient Algorithms..
VI and PI approaches use Dynamic Programming Update Set the value of a state in terms of the maximum expected value achievable by doing actions from that state. They do the update for every statein the state space Wasteful if we know the initial state(s) that the agent is starting from Heuristic search (e.g. A*/AO*) explores only the part of the state space that is actually reachable from the initial state Even within the reachable space, heuristic search can avoid visiting many of the states. Depending on the quality of the heuristic used.. But what is the heuristic? An admissible heuristic is a lowerbound on the cost to reach goal from any given state It is a lowerbound on J*! Heuristic Search vs. Dynamic Programming (Value/Policy Iteration)
Real Time Dynamic Programming[Barto, Bradtke, Singh’95] Trial: simulate greedy policy starting from start state; perform Bellman backup on visited states RTDP: repeat Trials until cost function converges RTDP was originally introduced for Reinforcement Learning For RL, instead of “simulate” you “execute” You also have to do “exploration” in addition to “exploitation” with probability p, follow the greedy policy with 1-p pick a random action What if we simulate the action’s effect with noise (rather than exactly wrt its transition probabilities)
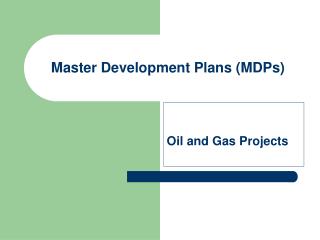
RTDP Trial Min s0 Note that the value function is being updated per each level. How about waiting until you hit goal and then update everyone? Jn Qn+1(s0,a) agreedy = a2 Jn ? a1 Jn Goal a2 ? Jn+1(s0) Jn a3 ? Jn Jn Jn
Greedy “On-Policy” RTDP without execution Using the current utility values, select the action with the highest expected utility (greedy action) at each state, until you reach a terminating state. Update the values along this path. Loop back—until the values stabilize
Labeled RTDP [Bonet&Geffner’03] Initialise J0 with an admissible heuristic ⇒Jn monotonically increases Label a state as solved if the Jn for that state has converged Backpropagate ‘solved’ labeling Stop trials when they reach any solved state Terminate when s0 is solved high Q costs s ? G t best action ) J(s) won’t change! high Q costs s G both s and t get solved together
Properties admissible J0⇒ optimal J* heuristic-guided explores a subset of reachable state space anytime focusses attention on more probable states fast convergence focusses attention on unconverged states terminates in finite time
Other Advances Ordering the Bellman backups to maximise information flow. [Wingate & Seppi’05] [Dai & Hansen’07] Partition the state space and combine value iterations from different partitions. [Wingate & Seppi’05] [Dai & Goldsmith’07] External memory version of value iteration [Edelkamp, Jabbar & Bonet’07] …