Download
1 / 21
210 likes | 413 Views
Mechanismy s konstantním převodem. Dynamika I, 9 . přednáška. Obsah přednášky :. veličina - převod mechanismu, valivé soukolí, ozubené soukolí, předlohové a planetové soukolí, kladkostroje a variátory. Doba studia :. asi 1 hodina. Cíl přednášky :.

E N D
Mechanismy s konstantním převodem Dynamika I, 9. přednáška Obsah přednášky : veličina - převod mechanismu, valivé soukolí, ozubené soukolí, předlohové a planetové soukolí, kladkostroje a variátory. Doba studia : asi 1 hodina Cíl přednášky : seznámit studenty s různými druhy mechanismů s konstantním převodem, s jejich kinematickým řešením.
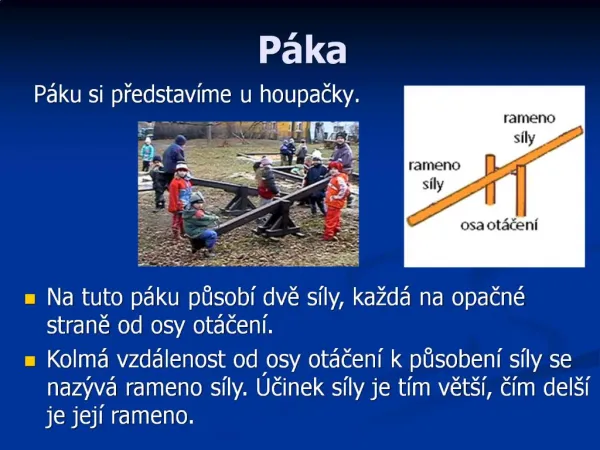
r y w, e f Dynamika I, 9. přednáška Převod mechanismu analytické řešení mechanismu s pravoúhlou kulisou Hnacím členem kulisového mechanismu je klika délky r, rotují úhlovou rychlostí w a s úhlovým zrychlením e, jejíž poloha je dána úhlem natočení f. Zjevně platí : Hnaným členem je kulisa, konající posuvný, přímočarý, vratný pohyb (zde ve svislém směru). Poloha kulisy je dána souřadnicí y - výška osy kulisy nad osou rotace kliky. Rychlost a zrychlení kulisy jsou v a a : Z geometrie mechanismu vyplývá tzv. zdvihová závislost : Dvojí derivací zdvihové závislosti podle času získáme rychlost a zrychlení kulisy : převod Poměr rychlostí hnaného a hnacího členu nazýváme převod (označený p). Ten je zde funkcí polohy : derivace převodu mechanismus s proměnným převodem
Dynamika I, 9. přednáška Převod mechanismu analytické řešení řetězového převodu Hnacím členem řetězového převodu je talíř o poloměru R, rotují úhlovou rychlostí wt a s úhlovým zrychlením et, jeho poloha je dána úhlem natočení f. Zjevně platí : v = wt·R = wk·r f talíř kolečko R r wt,et Hnaným členem je kolečko o poloměru r, rotují úhlovou rychlostí wk a s úhlovým zrychlením ek, jeho poloha je dána úhlem natočení y. I zde platí : wk, ek y Při pootočení mechanismu se z kolečka odvine jistá délka řetězu s. Protože nemůže dojít k prověšení řetězu ani k jeho přetržení, je zřejmé, že na talíř se navine stejně dlouhá délka s. Tato délka je v obou případech rovna součinu úhlu natočení [rad] a poloměru. Zdvihová závislost tedy je : Úhlová rychlost a úhlové zrychlení kolečka pak jsou : Poměr rychlostí hnaného a hnacího členu nazýváme převod. Ten je zde konstantní : převod mechanismus s konstantním převodem
Dynamika I, 9. přednáška Převod mechanismu analytické řešení řetězového převodu Hnacím členem řetězového převodu je talíř o poloměru R, rotují úhlovou rychlostí wt a s úhlovým zrychlením et, jeho poloha je dána úhlem natočení f. Zjevně platí : v = wt·R = wk·r f talíř kolečko R r wt,et Hnaným členem je kolečko o poloměru r, rotují úhlovou rychlostí wk a s úhlovým zrychlením ek, jeho poloha je dána úhlem natočení y. I zde platí : wk, ek y Převod je konstantní,nemění se podle okamžitépolohy mechanismu (např. podle sklonu pedálů). Zrychlení hnaného a hnacího členujsou ve stejném poměru (převod) jako rychlosti(toto neplatí pro mechanismys proměnným převodem). Zdvihová závislost tedy je : Úhlová rychlost a úhlové zrychlení kolečka pak jsou : Poměr rychlostí hnaného a hnacího členu nazýváme převod. Ten je zde konstantní : převod mechanismus s konstantním převodem
Dynamika I, 9. přednáška Mechanismy s konstantním převodem valivé soukolí Hnacím členem je kolo 1 o poloměru r, rotují úhlovou rychlostí w1 a s úhlovým zrychlením e1, jeho poloha je dána úhlem natočení f. Hnacím členem je kolo 1 o poloměru r, rotují úhlovou rychlostí w1 a s úhlovým zrychlením e1, jeho poloha je dána úhlem natočení y. Povrchy obou kol se po sobě valí bez prokluzu. Při pootočení o jistý úhel f, resp. y, se po sobě odvalí na obou kolech stejný obvod s. Podobně, jako u řetězového převodu, i zde platí : Poznámka k pojmu „převod“. Při převodu „do pomala“ (což je v technické praxi většina) je takto definovaný převod p<1. V oblasti konstrukce převodovek bývá obvykle převod označován i a je definován opačně. Při převodu „do pomala“ pak je i>1.
Dynamika I, 9. přednáška Mechanismy s konstantním převodem valivé kuželové soukolí U kuželového soukolí se po sobě odvalují dva kužele o vrcholových úhlech 2·g, resp. 2·d. Vybereme-li na společné dotykové přímce bod ve vzdálenosti z od společného vrcholu obou kuželů, pak tento bod obíhá po kružnici o poloměru r, resp. R. Další řešení je shodné s řešením dvou čelních kol : Pro oba poloměry platí : resp. Převod pak je : V technické praxi je velmi častý případ dvou k sobě kolmých os ... g + d = 90º. Převod pak je :
Dynamika I, 9. přednáška Mechanismy s konstantním převodem řazení převodů za sebou Valivé převody se často řadí za sebou (v sérii). Hnacím členem je kolo číslo 1 o poloměru r1, rotující úhlovou rychlostí w1. Tzv. předlohová hřídel nese dvě kola o poloměrech R2 a r2, rotující úhlovou rychlostí w2. Hnaným členem je kolo o poloměru R3, rotující úhlovou rychlostí w3. Poměry úhlových rychlostí jsou : Jsou-li dílčí převody jednotlivých párů kol : Pak celkový převod je : A pak : Je tedy patrné že dílčí převody se násobí.
Dynamika I, 9. přednáška Mechanismy s konstantním převodem ozubené soukolí Základní vlastností valivého převodu je že mezi koly nesmí docházet k prokluzu. To lze zajistit například tím, že povrch kol je pogumovaný a kola jsou k sobě přitlačena jistou silou. Pak mluvíme o třecím převodu. Toto provedení však není vhodné pro přenos větších sil. Pak se používá převod ozubenými koly. Podmínka neproklouznutí pak je zajištěna mechanicky tím, že každý zub jednoho kola je sevřen v mezeře mezi zuby druhého kola. 1 2 w1 w2 Pak každému kolu přiřadíme tzv. „roztečnou kružnici“. Ta představuje jakýsi střed (nikoliv aritmetický průměr) mezi vnější hlavovou a vnitřní patní kružnicí ozubeného kola. Roztečné kružnice, ačkoliv fyzicky neexistují, se po sobě valí stejně, jako válcové povrchy hladkých třecích kol. Převod pak je určen poměrem poloměrů roztečných kružnic.
Dynamika I, 9. přednáška Mechanismy s konstantním převodem ozubené soukolí Převod ozubeným soukolím sebou přináší nový problém. Pár spoluzabírajících zubů (tlačný zub na hnacím kole a tlačený zub na hnaném kole) představují obecnou kinematickou dvojici (mezi boky zubů dochází k prokluzu). Převod obecné kinematické dvojice se v obecném případě mění v závislosti na vzájemné poloze zubů. Je tedy mechanismem s proměnným převodem. tlačený bok tlačný bok w1 w2 (Tlačný bok zubu si můžeme představit jako kolo, jehož poloměr se v průběhu záběru zvětšuje, tlačený bok jako kolo, jehož poloměr se naopak zmenšuje.)
Dynamika I, 9. přednáška Mechanismy s konstantním převodem ozubené soukolí Vzhledem k tomu, že spoluzabírající páru zubů se při pohybu střídají, je převod periodickou funkcí. Každá perioda představuje záběr jednoho páru zubů. Proměnlivost převodu je krajně nevhodnou vlastností ozubeného soukolí. Vznikají dynamické rázy, zvyšuje se opotřebení apod. Proto je nezbytně nutné dosáhnout toho, aby se převod neměnil. Toho lze dosáhnout pouze vhodnou volbou tvaru boku zubu. Má-li kinematická dvojice tlačný zub - tlačený zub tvořit mechanismus s konstantním převodem, musí mít boky zubů tvar evolventy nebo epicykloidy.
Dynamika I, 9. přednáška Mechanismy s konstantním převodem předlohové soukolí Nejběžnější způsob kombinace převodů je tzv. předlohové soukolí. Předlohový hřídel nese dvě, pevně spolu spojená ozubená kola. Jak již bylo ukázáno dříve, celkový převod je dán součinem dílčích převodů.
Dynamika I, 9. přednáška Mechanismy s konstantním převodem planetové soukolí Planetové soukolí je tvořeno hnacím pastorkem (člen č. 1), satelitem (2), unášečem (3) a korunovým kolem. Korunové kolo je nehybné (pevně spojené s rámem) a je opatřené vnitřním ozubením. Pastorek je ozubené kolo, rotující úhlovou rychlostí w1. Unášeč je vidlice, rotující okolo shodné osy jako pastorek, úhlovou rychlostí w3. korunové kolo 2 satelit 2 3 unašeč 3 r2 w3 w1 w3 w1 R 1 r1 1 r3 pastorek Satelit je ozubené kolo, uložené na vidlici unášeče. Ozubení satelitu zapadá na jedné straně do ozubení pastorku, na druhé straně do vnitřního ozubení korunového kola. Satelit koná obecný rovinný pohyb, při kterém se otáčí okolo osy vidlice unášeče. Současně se valí po vnitřním povrchu korunového kola. Klíčové rozměry jsou : Ze zřejmých důvodů musí platit : R - poloměr korunového kola, r1 - poloměr pastorku, r2 - poloměr satelitu, r3 - poloměr unášeče.
Dynamika I, 9. přednáška Mechanismy s konstantním převodem planetové soukolí Převod planetového soukolí určíme analýzou rychlostí dvou bodů : S - střed satelitu, A - dotykový bod satelitu a pastorku. p - dotykový bod satelitu a korunového kola - pól pohybu (má nulovou rychlost). Bod S je bod na vidlici unášeče. Jeho rychlost je : Bod A je bod na povrchu satelitu, ale též bod na povrchu pastorku. Jeho rychlost je : Dle pólové konstrukce však též platí : Je tedy : Převod planetového soukolí pak je : Poznámka k výrazu pro převod : Rozměry planetového soukolí jsou popsány čtyřmi poloměry. Tyto však musí splňovat dvě podmínky (viz dříve). Dva poloměry jsou tedy nezávislé. Převod lze vyjádřit libovolnými dvěma ze čtyř poloměrů. Lze tedy sestavit šest vzorců.
Dynamika I, 9. přednáška Mechanismy s konstantním převodem planetové soukolí Provedení planetového soukolí s jedním satelitem není příliš výhodné. Při rotaci vznikají například dynamické účinky od odstředivé síly. Proto se v praxi používá obvykle provedení s více satelity (dvěma, třemi nebo i více). Všechny satelity jsou samozřejmě shodné. Odstředivé síly se navzájem vyruší a dynamické účinky se takto minimalizují. Kromě toho dochází k rozdělení přenášeného výkonu na více spoluzabírajících zubů a tyto pak mohou být dimenzovány na menší sílu (jsou např. užší). Kinematika celého mechanismu se samozřejmě nemění. Provedení s více satelity však přináší další problém. Zasuneme-li mezi zuby pastorku resp. korunového kola protilehlé zuby satelitu, dojde k polohovému ustavení celého mechanismu. Může se pak stát, že mezi zuby pastorku resp. korunového kola již nelze zasunout protilehlé zuby dalších satelitů. Celé soukolí musí tedy být navrženo tak, aby kromě již dříve uvedených rozměrových podmínek byla splněna též tzv. podmínka smontovatelnosti.
v,a Dynamika I, 9. přednáška Mechanismy s konstantním převodem kladkostroje Kladkostroje jsou mechanismy, tvořené lanem, pevnými a volnými kladkami. Nejjednodušší kladkostroj je tvořen jednou volnou kladkou, na níž je zavěšeno břemeno, zvedané rychlostí v. Lano je na jednom konci pevně uchyceno, za druhý konec táhneme rychlostí vl. Tažený konec lana může (není však podmínkou) být převeden přes pevnou převáděcí kladku. Ta však na kinematický rozbor nemá vliv. vl, al Převod kladkostroje určíme rozborem rychlosti volné kladky, přesněji dvou jejích bodů. Kladka se „šplhá“ po té větvi lana, jejíž konec je upevněn (na obrázku je to levá strana). Tato část lana má nulovou rychlost. Bod na kladce, kde se lano odpoutává od povrchu kladky, má tedy rovněž nulovou rychlost - je pólem p obecného rovinného pohybu, vykonávaného kladkou. Ve středu kladky je zavěšeno břemeno. Rychlost tohoto bodu v je tedy i rychlostí zvedaného břemene. Bod na kladce, kde se tažená část lana odpoutává od povrchu kladky, má rychlost taženého lana vl. Tento bod leží na protilehlé straně od středu kladky proti pólu p. Dle pólové konstrukce platí : vl = 2·v. Převod kladkostroje tedy je p = 0,5 (1:2).
v,a Dynamika I, 9. přednáška Mechanismy s konstantním převodem kladkostroje Převod můžeme stanovit i na základě jednoduché úvahy. Potáhneme-li za určitý čas tažený konec lana o délku s, část lana za převáděcí kladkou se tedy o tuto délku prodlouží, část lana před převáděcí kladkou se o stejnou délku musí zkrátit. Toto zkrácení se však rozdělí na dvě větve lana - nabíhající na volnou kladku a odbíhající od volné kladky. Břemeno se tedy posune vzhůru o poloviční dráhu. vl, al
v,a Dynamika I, 9. přednáška Mechanismy s konstantním převodem kladkostroje Kladkostroj se dvěma volnými kladkami je dále tvořen minimálně jednou pevnou kladkou. Obě volné kladky jsou na společné ose, na níž je zavěšeno břemeno. Lano je na konci upevněno. První část lana (na obrázku zcela vlevo) má tedy nulovou rychlost. Lano je dále převedeno přes jednu volnou kladku vzhůru (na obrázku zcela vpravo), přes pevnou kladku zpět k břemenu a přes druhou volnou kladku je taženo. vl, al Druhá část lana (od první volné kladky k pevné kladce) se pohybuje rychlostí 2·v (viz řešení jednoduchého kladkostroje). Převedením přes pevnou kladku ve třetí části lana (od pevné kladky ke druhé volné kladce) se změní směr rychlosti, nikoliv však její velikost 2·v.
Dynamika I, 9. přednáška Mechanismy s konstantním převodem kladkostroje Na druhé volné kladce jsou poněkud složitější kinematické poměry. Střed kladky se pohybuje rychlostí v vzhůru, levý okraj - nabíhající třetí část lana, se pohybuje rychlostí 2·v dolů. Pól pohybu p tedy leží v jedné třetině poloměru kladky. Rychlost odbíhající části lana, jakož i výsledná rychlost taženého konce lana, pak je vl = 4·v. Převod kladkostroje je p = 0,25 (1:4).
Dynamika I, 9. přednáška Mechanismy s konstantním převodem kladkostroje I v tomto případě můžeme převod stanovit jednodušeji. Potáhneme-li za určitý čas tažený konec lana o délku s, část lana za převáděcí kladkou se tedy o tuto délku prodlouží, část lana před převáděcí kladkou se o stejnou délku musí zkrátit. Toto zkrácení se však rozdělí na čtyři větve lana. Břemeno se tedy posune vzhůru o čtvrtinovou dráhu.
Dynamika I, 9. přednáška Mechanismy s konstantním převodem variátory V celé řadě případů je účelné převodový mechanismus navrhnout tak, aby se jeho převod mohl snadno měnit. Pohybem řadící páky v automobilu měníme převod převodovky. Pootočením ovládací páčky přehazovačky měníme převod řetězového pohonu jízdního kola. V některých případech lze převod měnit spojitě. Dva kuželové bubny jsou navzájem propojeny třecím převodem přes kladičku. Podle polohy kladičky podél povrchové přímky kužele se mění hodnota převodu, může se jednat o převod „do pomala“ nebo „do rychla“. Ve všech těchto případech dochází ke změně převodu na základě vnějšího zásahu. Jedná se opět o mechanismy s konstantním převodem, ve zvláštním provedení, umožňujícím snadnou změnu převodu. Stále však platí : Při přeřazení rychlosti v automobilu se z hlediska kinematiky děje prakticky totéž, jako bychom vymontovali jednu převodovku a zamontovali druhou. Při přehození přehazovačky na jízdním kole se z hlediska kinematiky děje prakticky totéž, jako bychom seskočili z jednoho kola a naskočili na jiné.
Dynamika I, 9. přednáška mechanismy s proměnným převodem Abychom zdůraznili rozdíl mezi mechanismy s konstantním a proměnným převodem, připomeňme obecné řešení mechanismu s proměnným převodem. Hnacím členem vačkového mechanismu je vačka, rotující úhlovou rychlostí w a s úhlovým zrychlením e, její okamžitá poloha je dána úhlem natočení f. Hnaným členem je zvedátko, posouvající se rychlostí v a se zrychlením a, jeho poloha je dána svislou délkovou souřadnicí y. Ta je funkcí úhlu natočení vačky : Rychlost zvedátka je rovna součinu úhlové rychlosti vačky a převodu (proměnného) : Převod se mění automaticky, bez vnějšího zásahu, jako přímý důsledek změny polohy. Zrychlení zvedátka je dáno součinem úhlového zrychlení vačky a převodu, a dále součinem kvadrátu úhlové rychlosti vačky a derivace převodu (tento druhý člen u mechanismů s konstantním převodem odpadá).