زمستان 1382
شايان توجه است كه در تخمينگر حلقه باز از ورودي و ماتريسهاي C,B,A استفاده كرديم لذا بهرهگيري از خروجي باضافه اطلاعات فوق ميتواند نتايج بهتري را بدنبال داشته باشد. لذا سيستم زير را ارائه ميدهيم :. زمستان 1382. Dr. H. Bolandi. تخمينزننده حالت مجانبي. زمستان 1382. Dr. H. Bolandi.

زمستان 1382
E N D
Presentation Transcript
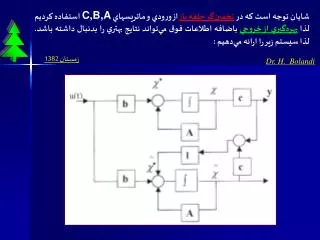
شايان توجه است كه در تخمينگر حلقه باز از ورودي و ماتريسهاي C,B,A استفاده كرديم لذا بهرهگيري از خروجي باضافه اطلاعات فوق ميتواند نتايج بهتري را بدنبال داشته باشد. لذا سيستم زير را ارائه ميدهيم : زمستان 1382 Dr. H. Bolandi
تخمينزننده حالت مجانبي زمستان 1382 Dr. H. Bolandi معادله ديناميكي تخمينزننده مجانبي را با توجه به شكل بصورت زير داريم:
اگر تعريف كنيم كه : زمستان 1382 Dr. H. Bolandi ديناميك خطا تخمينگر :
اگر ما بتوانيم مقادير ويژه A-LC )(را به صورت اختياري تعيين كنيم آنگاه ميتوان رفتار خطارا كنترل نمود. زمستان 1382 Dr. H. Bolandi اگر بتوان مقادير ويژه (A-LC) را به نحو صحيح انتخاب كرد، آنگاه تخمين زننده مجانبي به مراتب كاراتر از تخمين زننده حقله باز خواهد بود.
روش طراحي تخمينگرfull order زمستان 1382 Dr. H. Bolandi اگر سيستم ديناميكي FE داده شده در معادلهمشاهدهپذير باشد آنگاه حالت آن ميتواند توسط تخمين زننده n بعدي زير تخمين زده شود. قضيه: با تعريف : خطا ميتواند توسط معادله زير كنترل شود.
جهت اثبات كافي است كه نشان دهيم اگر A و C مشاهدهپذير باشند آنگاه ميتوان تمامي مقادير ويژه (A-LC ) را بصورت اختياري تعيين كرد. زمستان 1382 Dr. H. Bolandi اثبات : پس بنابراين با در نظر گرفتن قضيه فوق :
در اين صورت كليه روشهاي ارائه شده جهت بدست آوردن فيدبك حالت در اينجا نيز كاربرد خواهد داشت. زمستان 1382 Dr. H. Bolandi مثال : يك تخمين زننده حالت مرتبه کامل را بنحوي طراحي كنيد كه قطبهاي رويتگر بصورت زير باشند :
حل : 1ـ چك كردن مشاهدهپذيري زمستان 1382 تعريف كنيم كه : لذا معادلة تخمين زننده حالت برابر است با :
را بنحوي تعيين كرد كه در واقع مقادير ويژه يا قطبهاي يعني بايد تخمينگر در محلهاي مطلوب واقع شوند. زمستان 1382 Dr. H. Bolandi
بهرة L را تعيين كنيم: ميتوانيم براي مثال با استفاده از فرمول آكرمن براي زمستان 1382 Dr. H. Bolandi
زمستان 1382 Dr. H. Bolandi مثال :
روش طراحي تخمينگرReduced order زمستان 1382 Dr. H. Bolandi فرض ميكنيم كه : ماتريس p را بشكل زير تعريف ميكنيم : ماتريس R بصورت اختياري تعيين ميشود، به نحوي كه معکوس ماتريس P وجود داشته باشد.
زمستان 1382 Dr. H. Bolandi معادلات حالت خروجي (1) را با استفاده از تبديل همانندي زير بشكل جديد دربياوريم :
اين سيستم را بفرم زير ارائه ميدهيم : ميتوانيم به طراحي تخمينگر با رتبة n-q بپردازيم . در اينجا با توجه به موجود بودن
معادله (5) قابل بازنويسي بصورت زير است : اگر تعريف کنيم : توابعي از سيگنالهاي شناخته شده و معين اگر معادله (6) مشاهدهپذير باشد آنگاه طراحي تخمينگر امكانپذير ميباشد.
قضيه : بصورت زير وجود خواهد داشت : در اينصورت يك تخمين زننده حالت (n-q) بعدي از با طراحی صحيح اين ماتريس، مقاددير ويژه رويتگر در محل مطلوب جايابی می شوند.
زمستان 1382 Dr. H. Bolandi اين معادله در واقع معادله تخمينگر (n-q) بعدي بر حسب y و u ميباشد.
زمستان 1382 Dr. H. Bolandi با انتخاب مناسب اين ماتريس ميتوانيم نرخ همگرايي خطا به سوي صفر را تعيين كنيم.
زمستان 1382 Dr. H. Bolandi معادله تخمينگر n بعدي :
بلوک دياگرام رويتگر کاهش يافته زمستان 1382 Dr. H. Bolandi
مثال :فرض كنيد كه سيستم زير داده شده است: زمستان 1382 Dr. H. Bolandi
يك تخمينگر Reduced order را بنحوي تعريف كنيد كه قطبهای رويتگر بصورت زير باشد : زمستان 1382 Dr. H. Bolandi
زمستان 1382 Dr. H. Bolandi معادله تخمينگر سه بعدي ما عبارت است از : تخمينگر كامل سيستم :
جمعبندي : در فرآيند جابجايي قطبها فرض كرديم كه متغيرهاي حالت قابل جابجايي و در دسترس باشند از آنجا كه عملاً اين فرض جاري نيست لذا از تخمينگر ، براي تخمين متغيرهاي حالت استفاده نموده تا تخمين حالتها در فيدبك حالت مورد استفاده قرار گيرند. بررسي اثر اضافه شدن تخمينگر به طراحي فيدبك حالت كنترل كننده فيدبك عبارت است از :
زمستان 1382 Dr. H. Bolandi تركيب شامل رؤيتگر و كنترلكننده شامل 2n معادله :