Download

1 / 7
550 likes | 2.84k Views
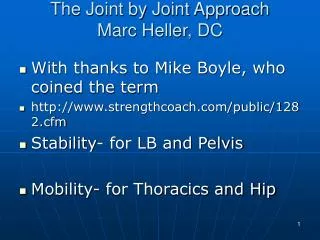
Bride Hydraulique. A. D. B. C. Classes d’équivalence cinématique 7 et 8 à exclure car déformable (Ressort, joint). A: { 1 , 2 , 5 , 6 } Bâti. B: { 3 } Piston. C: { 4 , 9 , 10 } Levier. D: { Pièce à usiner). Schéma cinématique 2D. AM de l'air sur le Piston. A. D. B.

E N D
Bride Hydraulique A D B C Classes d’équivalence cinématique 7 et 8 à exclure car déformable (Ressort, joint) A: {1, 2, 5, 6} Bâti B: {3} Piston C: {4, 9, 10} Levier D: { Pièce à usiner)
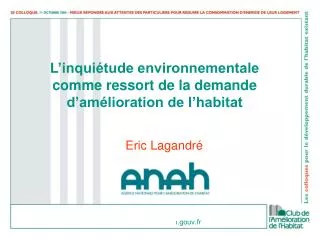
A D B 2 58,9 daN C 3 4 58,9 daN Etude de l'équilibre du Piston On Isole 3 BAME (Bilan des Actions Mécaniques Extérieures) 3 Actions Mécaniques Liaison Linéaire annulaire d’axe M,Y Liaison Ponctuelle de normale N,Y Tx 0 Rx 1 Ty 1 Ry 1 Tz 0 Rz 1 Tx 1 Rx 1 Ty 0 Ry 1 Tz 1 Rz 1
On calcule au point où il y a le plus d’inconnues, c’est-à-dire N ou M. Ici on prendra M car 2 torseurs sont déjà calculés en M Comme la distance NM sont sur le même axe que la résultante Principe Fondamental de la Statique De la première et deuxième équation, on trouve: X23 = 0 et Y43 = - 58,9
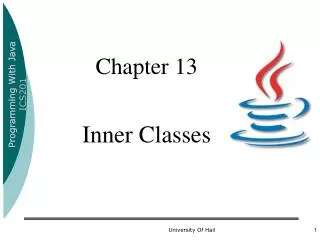
5 D 3 4 Etude de l'équilibre du Levier On Isole 4+9+10 BAME (Bilan des Actions Mécaniques Extérieures) 3 Actions Mécaniques A D B Liaison Ponctuelle de normale (N,Y) 58,9 daN Liaison Pivot d’axe (L,Z) C Liaison Ponctuelle de normale (K,Y) Tx 1 Rx 1 Ty 0 Ry 1 Tz 1 Rz 1 Tx 0 Rx 0 Ty 0 Ry 0 Tz 0 Rz 1 Tx 1 Rx 1 Ty 0 Ry 1 Tz 1 Rz 1
On calcule au point où il y a le plus d’inconnues, c’est-à-dire L. Calcul des moments en L PFS De la 1ère équation, on trouve X54 = 0 De la 3ème équation, on trouve: YP4= 86,71 Dans la 2ème équation, on obtient: Y54 = -145,61