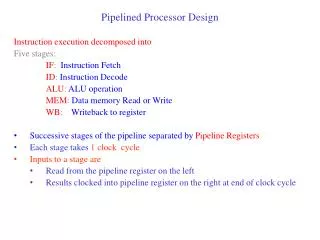

Scalable Processor Design
E N D
Presentation Transcript
Scalable Processor Design KshitijBantupalli Peter Ding Teddy Mopewou
The Processor • Electronic circuit • External data source • Memory or data stream • Central processing unit (CPU) • Specialized Processors • Graphics processing unit (GPU) • Neural processing unit (NPU)
CPU • Fetch • Retrieves an instruction from memory • Program counter • Decode • Instruction decoder • Instruction set architecture (ISA) • Convert the instruction into signals that control other parts of CPU • Execute • Perform the instruction
CPU Components • Control unit • Datapath • Arithmetic logic unit and pipelines • Memory • Register files, caches, memory management unit • Clock • Synchronous circuits
ISA • Interface between software and hardware • Specifies the instruction the computer can perform and the formart of the instruction • Complex instruction set computer (CISC) • Reduced instruction set computer (RISC) • Very long instruction word (VLIW) • Explicitly parallel instruction computing (EPIC)
CISC • Attempts to minimize the number of instructions per program • Sacrifices number of cycles per instruction • Multiple operations are embedded in one instruction • Complex instructions of varying lengths • Large number of instructions • Transistors for storing complex instructions
Advantages of CISC • Microprogramming is easy assembly language to implement, and less expensive than hard wiring a control unit. • As each instruction became more accomplished, fewer instructions could be used to implement a given task.
Disadvantages of CISC • The performance of the machine slows down due to the amount of clock time taken by different instructions will be dissimilar • Only 20% of the existing instructions is used in a typical programming event, even though there are various specialized instructions in reality which are not even used frequently.
RISC • Attempts to reduce the cycles per instruction • Sacrificing number of instructions per program • Pipelining • Overlapping the execution of several instructions in a pipeline • One cycle execution time • Fixed length instructions
Advantages of RISC over CISC • Many RISC processors use the registers for passing arguments and holding the local variables • Reduced instructions require less transistors of hardware space • Leaves more room for general purpose registers • Use a fixed length instruction which is easy to pipeline • The speed of the operation can be maximized and the execution time can be minimized • More power efficient • Mobile devices
CISC vs. RISC Implementation • CISC • MULT 2:3, 5:2 • RISC • LOAD A, 2:3 • LOAD B, 5:2 • PROD A,B • STORE 2:3, A
Register Windows • Register window overflow and underflow • Register window management • Register window incremental compilation
Introduction to SPARC • Short for scalable processor architecture. • It is a reduced instruction set computing(RISC) originally developed by Sun Microsystems. • It could have from 72 to 640 general purpose 64-bit registers. • It was scalable as it could scale from embedded processors to large server processors all sharing the same instruction set. • The number of implemented register windows changes in scaling.
VLIW • Processors that execute one instruction after another may be using resources inefficiently • Poor performance • Josh Fisher of Yale University in early 1980s • Exploits instruction level parallelism • Execute more than one instruction at a time (superscalar) • No instruction interdependencies • Moves the complexity from the hardware to the software • The complier handles the rest
VLIW Disadvantages • VLIW instruction sets are not backwards compatible between implementations • Load responses from memory do not have a deterministic delay • Very difficult static scheduling of load instructions for the complier
EPIC • Hewlett-Packard (HP) • Multiple software instructions (bundles) has a stop bit • Dependency information • Software prefetch instruction • Speculative load instruction • Check load instruction
Multithreading • A single CPU core executes multiple processes or threads concurrently • Better utilization of CPU resources • Multiple threads contenting with shared resources can degrade performance
Multithreading Types • Coarse-grained multithreading • Interleaved multithreading • Simultaneous multithreading
Multi-core Processors • Implements multiprocessing with one physical processor • Allows cache coherency circuity to operate at a significantly higher clock rate • Signals travel shorter distances, leading to less degradation • Uses less power than multiple processors equivalent
Multi-core Processors Disadvantages • Maximizing the potential of multi-core processors require adjustments to operating system and software • More difficult to handle thermally • Lower chip production yields
Asynchronous CPUs • No central clock • “Pipeline controls” or “FIFO sequencers” • Starts the next stage of logic after the existing stage is completed • Lower power consumption and electromagnetic interference • Speed only limited by propagation delays of logic gates • Components can run at different speeds • Clocked CPU components are synchronized with the central clock • Biggest disadvantage is most CPU design and testing tools are made for clocked CPUs
Caltech Asynchronous Microprocessor • World’s first asynchronous microprocessor in 1988 • When hot coffee was placed on the chip, the pulse rate slowed down • When liquid nitrogen was poured on the chip, the pulse rate increased • Ran on a potato
Optical Processors • Use light instead of electricity for digital logic • Up to 30% faster • Uses less power • However, current electric computing elements are far cheaper, faster, and more reliable • Economically unfeasible for the foreseeable future
Processor Design • Instructions per second • Floating point operations per second (FLOPS) • Performance per watt • Parallel computing • Low power consumption • Small size or low weight • Portable embedded systems
References • http://www.edgefxkits.com/blog/what-is-risc-and-cisc-architecture/ • https://cs.stanford.edu/people/eroberts/courses/soco/projects/risc/risccisc/ • http://www.async.caltech.edu/cam.html • http://www.async.caltech.edu/~mika/potato/potato.html • https://dl.acm.org/citation.cfm?doid=800046.801649 • https://courses.cs.washington.edu/courses/cse471/01au/epic_cgi.pdf