CS 326A: Motion Planning
580 likes | 1.4k Views
CS 326A: Motion Planning robotics.stanford.edu/~latombe/cs326/2004/index.htm Jean-Claude Latombe Computer Science Department Stanford University Goal of Motion Planning Compute motion strategies , e.g.: geometric paths time-parameterized trajectories

CS 326A: Motion Planning
E N D
Presentation Transcript
CS 326A: Motion Planning robotics.stanford.edu/~latombe/cs326/2004/index.htm Jean-Claude Latombe Computer Science Department Stanford University
Goal of Motion Planning • Compute motion strategies, e.g.: • geometric paths • time-parameterized trajectories • sequence of sensor-based motion commands • To achieve high-level goals,e.g.: • go to A without colliding with obstacles • assemble product P • build map of environment E • find object O
Fundamental Question Are two given points connected by a path? Valid region Forbidden region
E.g.: ▪Collision with obstacle ▪Lack of visibility of an object ▪Lack of stability Fundamental Question Are two given points connected by a path? Valid region Forbidden region
Basic Problem • Statement:Compute a collision-free path for a rigid or articulated object (the robot) among static obstacles • Inputs: • Geometry of robot and obstacles • Kinematics of robot (degrees of freedom) • Initial and goal robot configurations (placements) • Output: • Continuous sequence of collision-free robot configurations connecting the initial and goal configurations
Piano-mover problem Examples with Rigid Object Ladder problem
Compare! Valid region Forbidden region
Tool: Configuration Space • Problems: • Geometric complexity • Space dimensionality
Moving obstacles Multiple robots Movable objects Assembly planning Goal is to acquire information by sensing Model building Object finding/tracking Inspection Nonholonomic constraints Dynamic constraints Stability constraints Optimal planning Uncertainty in model, control and sensing Exploiting task mechanics (sensorless motions, under-actualted systems) Physical models and deformable objects Integration of planning and control Integration with higher-level planning Some Extensions of Basic Problem
Aerospace Robotics Lab Robot robot obstacles air thrusters gas tank air bearing
Two concurrent planning goals: • Reach the goal • Reach a safe region Total duration : 40 sec
Autonomous Helicopter [Feron] (MIT)
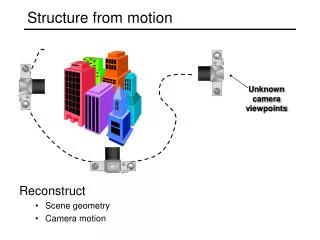
Map Building Where to move next?
Under-Actuated Systems video [Lynch] (Northwestern)
Motion Planning for Deformable Objects [Kavraki] (Rice)
Manufacturing: Robot programming Robot placement Design of part feeders Design for manufacturing and servicing Design of pipe layouts and cable harnesses Autonomous mobile robots planetary exploration, surveillance, military scouting Graphic animation of “digital actors” for video games, movies, and webpages Virtual walkthru Medical surgery planning Generation of plausible molecule motions, e.g., docking and folding motions Building code verification Examples of Applications
Design for Manufacturing/Servicing General Motors General Motors General Electric
Humanoid Robot [Kuffner and Inoue, 2000] (U. Tokyo)
Modular Reconfigurable Robots Casal and Yim, 1999 Xerox, Parc
Military Scouting and Planet Exploration [CMU, NASA]
Digital Actors Toy Story (Pixar/Disney) Antz (Dreamworks) A Bug’s Life (Pixar/Disney) Tomb Raider 3 (Eidos Interactive) The Legend of Zelda (Nintendo) Final Fantasy VIII (SquareOne)
Motion Planning for Digital Actors Manipulation Sensory-based locomotion
Navigation Through Virtual Environments [Cheng-Chin U., UNC, Utrecht U.] video
Radiosurgical Planning Cross-firing at a tumor while sparing healthy critical tissue
Protein folding • Ligand binding Study of the Motion of Bio-Molecules
Goals of CS326A • Present a coherent framework for motion planning problems • Emphasis of “practical” algorithms with some guarantees of performance over “theoretical” or purely “heuristic” algorithms
Framework Continuous representation (configuration space and related spaces + constraints) Discretization (random sampling, criticality-based decomposition) Graph searching (blind, best-first, A*)
Practical Algorithms (1/2) • A complete motion planner always returns a solution plan when one exists and indicates that no such plan exists otherwise. • Most motion planning problems are hard, meaning that complete planners take exponential time in # of degrees of freedom, objects, etc.