Download
1 / 24
240 likes | 328 Views
System to Remotely Transport and Deploy an Unmanned Helicopter. MEM Senior Design Team Number 10. Dr. Paul Y. Oh (Advisor) Jason Collins (MEM) Michael Perreca (ECE) Caitlyn Worthington-Kirsch (MEM) Drexel Autonomous Systems Laboratory (D.A.S.L.) December 5, 2007. Overview.

E N D
System to Remotely Transport and Deploy an Unmanned Helicopter MEM Senior Design Team Number 10 Dr. Paul Y. Oh (Advisor) Jason Collins (MEM) Michael Perreca (ECE) Caitlyn Worthington-Kirsch (MEM) Drexel Autonomous Systems Laboratory (D.A.S.L.) December 5, 2007
Overview -Hazardous site rescue effort -UAV provide observational platform during “Golden Hour” -Not interfere with existing rescue efforts -Rapid unmanned transport and deployment -Adapt to dynamic situation -Current mission plan gap: Unmanned transport and deployment of UAV systems Goal: Design trailer to carry UAV to scene http://newsimg.bbc.co.uk/media/images/44194000/jpg/_44194534_afp203bodybonita.jpg http://www.viewimages.com/Search.aspx?mid=51919023&epmid=1&partner=Google
Thresholds and Objectives
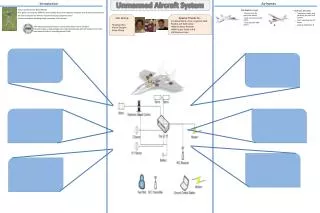
System Overview Enclosure framework Suspension Trailer Leveling gimbal
Design Parameters Leveling System -keep UAV level as trailer pitches and rolls -prevent UAV from hitting any part of trailer and support system -hold UAV in place during transit -release UAV for launch -hold platform in place for launch Suspension System -protect UAV from ground vibration -protect UAV from sideways and twisting motion
Design Parameters Trailer Base and Enclosure -fit through double doors (60") -protect UAV from debris and weather -use a standard trailer hitch -towable by 90 cc displacement ATV -fit inside a cargo van for long-distance transportation Actuator Electronics System -remotely actuate and monitor system electronics
Technical Requirements Leveling System:Level UAV platform to within +/- 2 degreesLock platform angle during takeoff Suspension System:Support approximately 100 lbsReduce vibration at 5HzReduce vibration by at least 90% Trailer/Enclosure:Maximum width 60”Shed minimum of 4mm/hr of rain Data Acquisition System:14 I/O PortsRemote range of 300ft
Leveling System Proposed Solution -Gimbal system to level platform -Breaks to dampen oscillation -Bump stops to prevent over travel
Dampening System Design Initial design: a classic spring-dashpot system Only moves along one axis Bowls made the ball design stable and adaptable A compressible sphere moves on all axes and is simple, but still unstable Allowing sideways movement - unstable Multiple systems for different axes – too complex
Dampening System Proposed Solution Compressible ball between two bowls Allows for sideways and twisting movement Transference of approximately 5% of vibration at 5 Hz Tunable for varying conditions by inflating and deflating ball Proof-of-concept Cad model
Data Acquisition andActuation ElectronicsPossible Solution Electronics QFD
Data Acquisition andActuation ElectronicsProposed Solution National Instruments Compact RIO • On-board data manipulation • Expandable through the use of NI C-Series Modules • 50 g shock rating • Temperature rating between -40 and 158 °F - Proven to process analog signals by the proof of concept • - Readily available from D.A.S.L. NI Compact RIO
Trailer and Enclosure Possible Solutions Option 1: 56” x 55” Deck over trailer Option 2:56” x 7'6” Deck over trailer Option 3:56” x 7'6” Deck over with box enclosure already installed Option 4:Custom built trailer by Senior Design Group Trailer/Enclosure QFD
Timeline Jan 14 – Design Freeze Jan 21 – all parts sourced and ordered Jan 28 – Begin building trailer, testing components as they are built Feb 11 – Gimbal built Feb 18 – Vibration control system built Feb 25 – Enclosure built Mar 10 – Full trailer testing begins May 5 – Final report and end of project
Projected Market Projected production price: $5,000 per unit Helicopter price: $40,000 per unit UAV transportation is a common problem in the field Over 80 companies are developing different UAVs, and over 5,000 UAVs are in use today* As UAVs gain popularity, producing a reliable means of off-road transportation is a viable profit source. *http://www.uavforum.com/library/librarian.htm
Budget Total project expenses, including salaries: $105,000 Total project expenses, excluding salaries: $10888 Actual expenditure: approx. $3000 Options represent high-end, mid-range, and low-end prototypes Options in: Frame and gimbal materials Enclosure material Trailer base
Deliverables • Leveling system • -Data Acquisition and Actuation Electronics -Suspension system -Enclosed Trailer -Testing Results -Final Design Report
Acknowledgements Dr. Paul Y. Oh D.A.S.L. Members MEM Senior Design Committee ECE Senior Design Committee All Those in Attendance
Thank You Questions? ?