Download
1 / 36
370 likes | 527 Views
Segmentation based Multi-View Stereo. fxlange@inf.fu-berlin.de stefan.otte@gmail.com Seminar: 3D Rekonstuktion FU-Berlin - SoSe 2011. MVS allgemein vs. Segmentation Based MVS. Generell gilt bei MVS → homogene Flächen sind problematisch (keine/wenig Features) Dieses Paper:

E N D
Segmentation basedMulti-View Stereo fxlange@inf.fu-berlin.de stefan.otte@gmail.com Seminar: 3D Rekonstuktion FU-Berlin - SoSe 2011
MVS allgemein vs. Segmentation Based MVS Generell gilt bei MVS → homogene Flächen sind problematisch (keine/wenig Features) Dieses Paper: • nutzt homogene Flächen • benötigt nur wenig Features pro Fläche • Flächen werden über Farbsegmentierung gefunden • "Nebenprodukt": gute Performance Annahme: • Flächen, homogen in Intensitaet und Farbe, bilden Flächen mit einheitlicher Normalen
Kamera-Kalibrierung Farbsegmentierung Initiale 3D-Seeds 3D-Segmente erstellen aus Farbsegmenten und 3D Seeds nicht zugeordneten Farbsegmenten Oberflächenkonstruktion (PSR) Pipeline / Inhalt
Farbsegmentierung Eigenschaften: • Vorverarbeitungsprozess zur Bestimmung von aussagekräftigen Gruppierungen / Regionen des Bildes • vielseitig einsetzbar, wenn effizient berechenbar Ziel: • charakteristische homogene Regionen Probleme: • großflächige Farb- / Intensitätsverläufe • Regionen mit hohen Schwankungen → lokale Kriterien reichen nicht aus
Farbsegmentierung graph-based image segmentation [8]:
Farbsegmentierung - Bild als Graph Kantengewichte entsprechen Intensitätsdifferenzen
Farbsegmentierung - Hauptkriterium Schmelzkriterium: DIFF(C1,C2) < MINT(C1,C2) ,mit MINT(C1,C2) = Min(INT(C1),INT(C2))
3D Seeds 3D-Seeds durch guided matching Gegeben: • Bilder Ziel: • Initiale 3D-Seeds Schritte: • Features • Matching • Triangulation • Clustering
wähle Reference-Image Ir Rest: Target-ImageIt unterteile in Rechtecke guided matching Features pro Rechteck 3D Seeds - Features
wähle Reference-Image Ir Rest: Target-ImageIt unterteile in Rechtecke guided matching Features pro Rechteck 3D Seeds - Features
wähle Reference-Image Ir Rest: Target-ImageIt unterteile in Rechtecke guided matching Features pro Rechteck 3D Seeds - Features
wähle Reference-Image Ir Rest: Target-ImageIt unterteile in Rechtecke guided matching Features pro Rechteck 3D Seeds - Features
Matchende Features finden: Feature in Ir auf epipolare Linie in It NCC für alle Features der Linie Match, wenn max. Korrelation von Ir zu It und umgekehrt 3D Seeds - Matching
Matchende Features finden: Feature in Ir auf epipolare Linie in It NCC für alle Features der Linie Match, wenn max. Korrelation von Ir zu It und umgekehrt 3D Seeds - Matching
Matchende Features finden: Feature in Ir auf epipolare Linie in It NCC für alle Features der Linie Match, wenn max. Korrelation von Ir zu It und umgekehrt 3D Seeds - Matching
3D-Seed erzeugen: klassische StereoVision Tiefeninformation aus Disparität 3D Seeds - Triangulation
Clustern: viele 3D-Seeds für gleichen Punkt Cluster von Seedsdurch einen 3D-Seed ersetzen 3D Seeds - Clustering
Segmentation Based MVS (SBMVS) Zusammenspiel der 3D-Seeds und der Farbsegmente Ziel: • 3D Segmente erstellen Schritte: • aus Farbsegmente und 3D Seeds • aus nicht zugeordneten Farbsegmenten
Zuordnung zwischen: 3D Seed X Farbsegment si SBMVS - Optimale 3D Segmente
Normalvektor n über durchtesten abschätzen (pro Achsen zwischen 0° und 180° in 18° Schritten) gegeben: 3D Koordinate - Fixpunkt 2D Form (Segment) gesucht: Normalvektor n der Fläche / des Segments SBMVS - Optimale 3D Segmente
im Detail: alle Pixel p aus si über n (und die epipolare Geometrie zwischen den Kameras) auf Targetbilder It abbilden SBMVS - Optimale 3D Segmente
Gradientenabstieg von bester Abschätzung aus Abschätzung und Optimierung über alle Targetbilder It genau ein 3D Segment pro Farbsegment SBMVS - Optimale 3D Segmente
SBMVS - freie Farbsegmente explored - unexplored - explored
SBMVS - freie Farbsegmente • Schnittpunkt von r und dem benachbarten 3D Segment als neuer 3D Seed • Abschätzung und Optimierung von n => 3D Segment
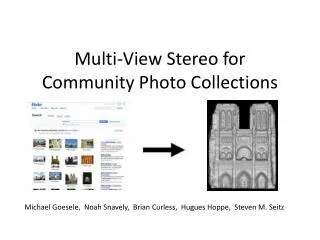
Oberflächkonstruktion mit PSR Poisson Surface Reconstruction gegeben: • Oberflächen-Samples gesucht: • 3D-Mesh umbauen Idee: • Indikatorfunktion:Aussen < 0 < Innen Hintergrund: • Poisson Gleichung: elliptische partitielle Differentialgleichung oft bei Randwertproblemen verwendet. Ähnlich zur Laplace-Gleichung. • Octree als Datenstruktur
Octree erzeugen Vektor-Feld Indikator-Funktionen Divergenz: Vector -> Scalar Poisson-Gleichung lösen Extrahiere Isofläche Poisson Surface Reconstruction
Octree erzeugen Vektor-Feld Indikator-Funktionen Divergenz: Vector -> Scalar Poisson-Gleichung lösen Extrahiere Isofläche Poisson Surface Reconstruction
Octree erzeugen Vektor-Feld Indikator-Funktionen Divergenz: Vector -> Scalar Poisson-Gleichung lösen Extrahiere Isofläche Poisson Surface Reconstruction
Octree erzeugen Vektor-Feld Indikator-Funktionen Divergenz: Vector -> Scalar Poisson-Gleichung lösen Extrahiere Isofläche Poisson Surface Reconstruction
Octree erzeugen Vektor-Feld Indikator-Funktionen Divergenz: Vector -> Scalar Poisson-Gleichung lösen Extrahiere Isofläche Poisson Surface Reconstruction
Farbsegmentierung Initiale 3D-Seeds 3D-Segmente erstellen aus Farbsegmente und 3D Seeds nicht zugeordneten Farbsegmenten Oberflächenkonstruktion (PSR) Was bisher geschah ...
Ergebnisse Aussagen der Autoren: • Homogene Farb-Regionen werden gut erkannt • Genauigkeit mit anderen Verfahren vergleichbar • Gute Performance: 35 min vs 3h pro Bild Unsere Bewertung: • Vergleich der Performance relativ nichtssagend • Genauigkeit nur in einem nicht erklärten Plot erklärt • Algorithmen im Fließtext erklärt
Fragen? Besten Dank!
Resources Marc Pollefeys. Visual 3D Modeling from Images. University of North Carolina - Chapel Hill, USA. http://www.cs.unc.edu/~marc/tutorial/ [1] http://people.cs.uchicago.edu/~pff/segment/ [8] Pedro F. Felzenszwalb and Daniel P. Huttenlocher. Efficient graph-based image segmentation. In IJCV, 2004. [9] Y. Furukawa and J. Ponce. Accurate, dense, and robust multi-view stereopsis. In CVPR, pages 1–8, 2007. [10] C. Harris and M. Stephens. A combined corner and edge detector. In 4th Alvey Vision Conference, pages 147–151, 1998. [11] R. Hartley and A. Zisserman. Multiple view geometry in computer vision. In Cambridge University Press, 2003. [16] S. Kruglyak L. J. Heyer and S. Yooseph. Exploring expression data: Identification and analysis of coexpressed genes. In Genome Research, pages 9:1106–1115, 1999.