Threads
Threads. Chapter 4 Threads are a subdivision of processes Since there is less information associated with a thread than there is info associated with a process, thread switching is easier than process switching. Process Characteristics. Unit of resource ownership - process is allocated:

Threads
E N D
Presentation Transcript
Threads Chapter 4 Threads are a subdivision of processes Since there is less information associated with a thread than there is info associated with a process, thread switching is easier than process switching Chapter 4
Process Characteristics • Unit of resource ownership - process is allocated: • a virtual address space to hold the process image • control of some resources (files, I/O devices...) • Unit of execution - process is an execution path through one or more programs • execution may be interleaved with other processes • the process has an execution state and a priority Chapter 4
Process Characteristics • These 2 characteristics are treated independently by some recent OS • The unit of execution is usually referred to a thread or a lightweight process(book talks of unit of dispatching, similar concept) • The unit of resource ownership is usually referred to as a process or task Chapter 4
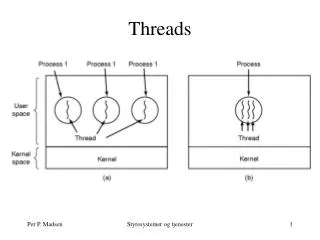
Multithreading vs. Single threading • Multithreading: when the OS supports multiple threads of execution within a single process • Single threading: when the OS does not recognize the concept of thread • MS-DOS support a single user process and a single thread • UNIX supports multiple user processes but only supports one thread per process • Solaris, Linux, Windows NT and 2000, OS/2 support multiple threads Chapter 4
Threads and Processes Chapter 4
Processes • Have a virtual address space which holds the process image • Protected access to processors, other processes, files, and I/O resources Chapter 4
Threads • Have execution state (running, ready, etc.) • Save thread context when not running • Have private storage for local variables and execution stack • Have shared access to the address space and resources (files…) of their process • when one thread alters (non-private) data, all other threads (of the process) can see this • threads communicate via shared variables • a file opened by one thread is available to others Chapter 4
Single Threaded and Multithreaded Process Models Thread Control Block contains a register image, thread priority and thread state information (compare with Fig. 3.14) Chapter 4
Benefits of Threads vs Processes • It takes less time to create a new thread than a new process • Less time to terminate a thread than a process • Less time to switch between two threads within the same process than to switch between processes • Mainly because a thread is associated with less information. Chapter 4
Benefits of Threads • Example: a file server on a LAN • It needs to handle several file requests over a short period • Hence more efficient to create (and destroy) a single thread for each request • Such threads share files and variables • In Symmetric Multiprocessing: different threads can possibly execute simultaneously on different processors • Example 2: one thread displays menu and reads user input while the other thread executes user commands Chapter 4
Application benefits of threads • Consider an application that consists of several independent parts that do not need to run in sequence • Each part can be implemented as a thread • Whenever one thread is blocked waiting for an I/O, execution could possibly switch to another thread of the same application (instead of switching to another process) Chapter 4
Benefits of Threads • Since threads within the same process share memory and files, they can communicate with each other without invoking the kernel • Therefore necessary to synchronize the activities of various threads so that they do not obtain inconsistent views of the data (chap 5) Chapter 4
Terminaison de processus et fils • Suspending a process involves suspending all threads of the process • Termination of a process terminates all threads within the process • Since all such threads share the same address space in the process Chapter 4
Threads States • As for processes, three key states: running, ready, blocked • They cannot have suspend state because all threads within the same process share the same address space (same memory) • A thread is created by another thread using a command often called Spawn • Finish is the state of a process that is completing Chapter 4
Remote Procedure Call Using Multiple Threads:less waiting time Chapter 4
Thread management • Thread management can be done in one of three fundamental ways: • User-level thread: threads are entirely managed by the application • Kernel-level threads: threads are entirely managed by the OS kernel • Combined approaches Chapter 4
User-Level Threads (ULT) (ex. Standard UNIX) • The kernel is not aware of the existence of threads • All thread management is done by the application using a thread library • Thread switching does not require kernel mode privileges (no mode switch) • Scheduling is application specific Chapter 4
Threads library • Contains code for: • creating and destroying threads • passing messages and data between threads • scheduling thread execution • saving and restoring thread contexts Chapter 4
Kernel activity for ULTs • The kernel is not aware of thread activity but it still manages process activity • When a thread makes a system call, the whole process is blocked • But for the thread library that thread is still in running state • So thread states are independent of process states Chapter 4
Advantages Thread switching does not involve the kernel: no mode switching Scheduling can be application specific: choose the best algorithm. Can run on any OS. Only needs a thread library Disadvantages Most system calls are blocking for processes. So all threads within a process will be blocked The kernel can only assign processes to processors. Two threads within the same process cannot run simultaneously on two processors Advantages and disadvantages of ULT Chapter 4
Kernel-Level Threads (KLT) Ex:Windows NT, 2000, Linux and OS/2 • All thread management is done by kernel • No thread library but an API to the kernel thread facility • Kernel maintains context information for the process and the threads • Switching between threads requires the kernel • Scheduling on a thread basis Chapter 4
Advantages the kernel can simultaneously schedule many threads of the same process on many processors blocking is done on a thread level kernel routines can be multithreaded Inconveniences thread switching within the same process involves the kernel. We have 2 mode switches per thread switch this may results in a significant slow down however kernel may be able to switch threads quicker than user’s lib Advantages and disadvantages of KLT Chapter 4
Combined ULT/KLT Approaches (Solaris) • Thread creation done in the user space • Bulk of scheduling and synchronization of threads done in the user space • The programmer may adjust the number of KLTs • Combines the best of both approaches Chapter 4
Solaris • Process includes the user’s address space, stack, and process control block • User-level threads (threads library) • invisible to the OS • are the interface for application parallelism • Kernel threads • the unit that can be dispatched on a processor • Lightweight processes (LWP) • each LWP supports one or more ULTs and maps to exactly one KLT • LWPs are visible to applications • therefore LWP are the way the user sees the KLT • constitute a sort of ’virtual CPU’ Chapter 4
Process 2 is equivalent to a pure ULT approach ( = Unix) Process 4 is equivalent to a pure KLT approach ( = Win-NT, OS/2) We can specify a different degree of parallelism (process 3 and 5) Chapter 4
Solaris: versatility • We can use ULTs when logical parallelism does not need to be supported by hardware parallelism (we save mode switching) • Ex: Multiple windows but only one is active at any one time • If ULT threads can block then we can add two or more LWPs to avoid blocking the whole application • Note versatility of SOLARIS that can operate like Windows-NT or like conventional Unix Chapter 4
Solaris: user-level thread execution (threads library). • Transitions among states are under the control of the application: • they are caused by calls to the thread library • It’s only when a ULT is in the active state that it is attached to a LWP (so that it will run when the kernel level thread runs) • A thread may transfer to the sleeping state by invoking a synchronization primitive (chap 5) and later transfer to the runnable state when the event waited for occurs • A thread may force another thread to go to the stop state Chapter 4
Solaris: user-level thread states (attached to a LWP) Chapter 4
Decomposition of user-level Active state • When a ULT is Active, it is associated to a LWP and thus to a KLP. • Transitions among the LWP states is under the exclusive control of the kernel • A LWP can be in the following states: • running: assigned to CPU = executing • blocked because the KLT issued a blocking system call (but the ULT remains bound to that LWP and remains active) • runnable: waiting to be dispatched to CPU Chapter 4
Solaris: Lightweight Process States LWP states are independent of ULT states (except for bound ULTs) Chapter 4
Multiprocessing: Categories of Systems • Single Instruction Single Data (SISD) • single processor executes a single instruction stream to operate on data stored in a single memory • Single Instruction Multiple Data (SIMD) • each instruction is executed on a different set of data by the different processors • typical application: matrix calculations • Multiple Instruction Single Data (MISD) • several CPUs execute on a single set of data. Never implemented, probably not practical • Multiple Instruction Multiple Data (MIMD) • a set of processors simultaneously execute different instruction sequences on different data sets Chapter 4
Symmetric Multiprocessing • Kernel can execute on any processor • Typically each processor does self-scheduling form the pool of available processes or threads Chapter 4
Design Considerations • Managing kernel routines • they can be simultaneously in execution by several CPUs • Scheduling • can be performed by any CPU • Interprocess synchronization • becomes even more critical when several CPUs may attempt to access the same data at the same time • Memory management • becomes more difficult when several CPUs may be sharing the same memory • Reliability or fault tolerance • if one CPU fails, the others should be able to keep the system in function Chapter 4
Microkernels: a trend • Small operating system core • Contains only essential operating systems functions • Many services traditionally included in the operating system kernel are now external subsystems • device drivers • file systems • virtual memory manager • windowing system • security services Chapter 4
Layered Kernel vs Microkernel Chapter 4
Client-server architecture in microkernels • the user process is the client • the various subsystems are servers Chapter 4
Benefits of a Microkernel Organization • Uniform interface on request made by a process • All services are provided by means of message passing • Extensibility and flexibility • Facilitates the addition and removal of services and functionalities • Portability • Changes needed to port the system to a new processor may be limited to the microkernel Reliability • Modular design • Small microkernel can be rigorously tested Chapter 4
More Benefits of a Microkernel Organization • Distributed system support • Message are sent without knowing what the target machine is • Object-oriented operating system • Components are objects with clearly defined interfaces Chapter 4
Microkernel Elements • Low-level memory management • elementary mecanisms for memory allocation • support more complex strategies such as virtual memory • Inter-process communication • I/O and interrupt management Chapter 4
Layered Kernel vs Microkernel Chapter 4
Microkernel Performance • Microkernel architecture may be less performant than traditional layered architecture • Communication between the various subsystems causes overhead • Message-passing mechanisms less performant than simple system call Chapter 4
Important concepts of Chapter 4 • Threads and difference wrt processes • User level threads, kernel level threads and combinations • Thread states and process states • Different types of multiprocessing • Microkernel architecture Chapter 4