Evolution Strategies: Key Concepts and Practical Applications
Explore the principles behind evolution strategies (ES) developed in the early 60s in Germany, focusing on mutation, dynamic standard deviation adaptation, multi-member evolution strategies, and differences compared to genetic algorithms (GAs). Learn about the two main ES variants, (µ+λ)-ES and (µ,λ)-ESs, and the nuanced contrasts with traditional GAs. Discover how ES and GAs handle constraints, selection processes, and the role of mutation and crossover. Dive into the debate on the fundamental distinctions between ES and GAs in evolutionary computation.

Evolution Strategies: Key Concepts and Practical Applications
E N D
Presentation Transcript
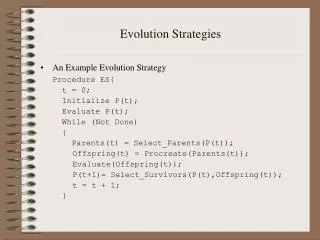
Evolution Strategies • Originally developed in Germany in the early 60s with Rechenberg and Schwefel being the main contributors. Main ideas include: • floating point representation with standard derivation: (x,) where x is a vector in n-dimensional space and is the standard derivation that influeces how solutions are changed: x’= x + N(0, ). • mutation is the sole operator. • in most approaches is changed dynamically (e.g. using Rechenberg’s 1/5 Rule). • employs a two-member evolution strategy. • Was later generalized to support multi-membered evolution strategies: • employs: uniform crossover and averaging crossover. • each member of the population has the same chance to reproduce (selection doesn’t consider fitness). • weakest individual is eliminated to keep a constant population size.
-ES and -ESs. • developed by H.P. Schwefel: 2-member population ((1+1)-ES) is generalized to multi-membered populations. 2 approaches are supported • ()-ES: • individuals produceoffsprings • the population consisting ofindividuals (the old generation and the parents) is reduced to using selection. • relies on replacement • ()-ESs: • lifetime of individuals is limited to one generation. • individual produce offsprings ( > ) with the best surviving. • generates the new generation from the scratch • Moreover, the standard deviation undergoes evolution.
Evolutionsstrategie and GAs • Differences ES and trad. GAs : • real-code (ES) vs. binary string representation (GA) • selection is performed implicitly by removing unfit individual deterministically (ES); GAs employ a stoachastic selection process, and does not rely on removal.. • selection after recombination (ES); selection before recombination (GA). • different handling of constraints: ES supports un-equalities as a part of the problem specification, and disqualifies illegal offspring; moreover, ES adjusts control parameters if illegal offspring occur too frequently. GAs, on the other hand, employ penalty functions. • mutation is less important for traditional GAs; crossover is less important for ESs. • Some scientists, e.g. Fogel, claim that ES and GAs are not fundamentally different (see also Hoffmeister’s paper [141]).