Download
1 / 9
90 likes | 299 Views
COMMON WEAK LYAPUNOV FUNCTIONS and OBSERVABILITY. Daniel Liberzon. Coordinated Science Laboratory and Dept. of Electrical & Computer Eng., Univ. of Illinois at Urbana-Champaign. ( weak Lyapunov function).

E N D
COMMON WEAK LYAPUNOV FUNCTIONS and OBSERVABILITY Daniel Liberzon Coordinated Science Laboratory and Dept. of Electrical & Computer Eng., Univ. of Illinois at Urbana-Champaign
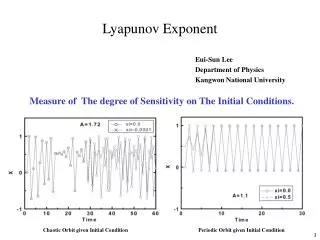
(weak Lyapunov function) • is not identically zero along any nonzero solution (observability with respect to ) Example: => GAS observable OBSERVABILITY and ASYMPTOTIC STABILITY Barbashin-Krasovskii-LaSalle theorem: is GAS if s.t.
SWITCHED LINEAR SYSTEMS [Hespanha ’04] • s.t. . • observable for each • infinitely many switching intervals of length To handle nonlinear switched systems and non-quadratic weak Lyapunov functions, need a suitable nonlinear observability notion Theorem (common weak Lyapunov function): Switched linear system is GAS if
OBSERVABILITY: MOTIVATING REMARKS Several ways to define observability (equivalent for linear systems) Benchmarks: • observer design or state norm estimation • detectability vs. observability • LaSalle’s stability theorem for switched systems Joint work with Hespanha, Sontag, and Angeli No inputs here, but can extend to systems with inputs
STATE NORM ESTIMATION where (observability Gramian) Observability definition #1: where This is a robustified version of 0-distinguishability
OBSERVABILITY DEFINITION #1: A CLOSER LOOK Small-time observability: Large-time observability: Initial-state observability: Final-state observability:
DETECTABILITY vs. OBSERVABILITY Detectability is Hurwitz Observability can have arbitrary eigenvalues A natural detectability notion is output-to-state stability (OSS): [Sontag-Wang] where Observability def’n #2: OSS, and can decay arbitrarily fast
OSS admits equivalent Lyapunov characterization: For observability, should have arbitrarily rapid growth OBSERVABILITY DEFINITION #2: A CLOSER LOOK Definition: and Theorem:This is equivalent to definition #1 (small-time obs.)
SWITCHED NONLINEAR SYSTEMS • s.t. • Each system • infinitely many switching intervals of length is norm-observable: Theorem (common weak Lyapunov function): Switched system is GAS if [Hespanha–L–Sontag–Angeli ’05]