Download
1 / 23
230 likes | 354 Views
Legame tra , u e I d. dall’espressione di i s ( t ). si possono scegliere le costanti in modo da ottenere:. all’inizio della commutazione cioè per deve essere da cui:.

E N D
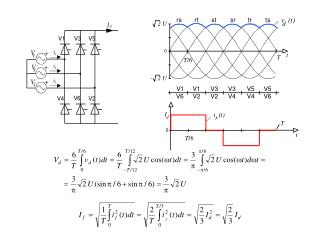
Legame tra , u e Id dall’espressione di is(t) si possono scegliere le costanti in modo da ottenere: all’inizio della commutazione cioè per deve essere da cui: per , cioè al termine della commutazione, si ha: e quindi (posto X=wL):
=- =-(+u)
Circuito elettrico equivalente di un collegamento HVDC con inverter funzionante ad a costante Circuito elettrico equivalente di un collegamento HVDC con inverter funzionante a g costante
funzionamento ad a costante e pari al valore minimo amin, funzionamento a g costante e pari al valore minimo gmin, funzionamento a corrente costante Id, agendo sull’angolo a. funzionamento a tensione costante, funzionamento ad angolo di accensione a massimo, funzionamento in controllo di corrente con limite dipendente dalla tensione sul collegamento (VDCOL Voltage Dependent Current Order Limiter) ecc
Modello alle variazioni supponendo costante la forza elettromotrice lato inverter sia ad a costante che g costante segno dipendente da R2: positivo a a costante Con parametri tipici e L1=L2 segno dipendente da R1+R2 segno dipendente da R1+R2
Normalizzando e supponendo Vor costante segno dipendente da R1+R2 La funzione di trasferimento y1(s) presenta due zeri complessi coniugati z1 e z2, due poli complessi coniugati p1 e p2 ed un polo reale p3 in -1/T. Nel funzionamento dell’inverter a g costante solitamente R2<0 in quanto la resistenza equivalente della commutazione dell’inverter Ri ha valore maggiore della Rl/2 di metà del collegamento. Pertanto i due zeri sono a parte reale positiva risultando zz<0. Il segno di zp invece dipende dalla somma R1+R2 che diviene negativa al diminuire della potenza di corto circuito della rete AC lato inverter ovvero quando Ri>Rr+Rl. Il polo reale in -1/T cambia anch’esso segno diventando positivo quando R1+R2 diviene negativo, così come il valore statico yo di y(s).
Inverter a g costante Poli e zeri funzione y(s) Poli e zeri sistema con controllo I Il sistema in ciclo aperto senza controllo di corrente è stabile solo se R1+R2>0 ovvero Pcc lato inv>Pccmin
Inverter a a costante poli e zeri a p.r. negativa luogo delle radici nel semipiano a p.r. neg. stabilità incondizionata Inverter a g costante stabilità condizionata da Pcc sulla rete lato inverter