Download

1 / 5
70 likes | 323 Views
PENGENDALIAN KECEPATAN MOTOR DC DENGAN PID CONTROLLER. Oleh Nicolaus Allu P2700212412. Ide dasar

E N D
PENGENDALIAN KECEPATAN MOTOR DC DENGAN PID CONTROLLER Oleh NicolausAllu P2700212412
Idedasar Sistempengendalianmenjadibagian yang tidakbisaterpisahkandalamproseskehidupaninikhususnyadalambidangrekayasaindustri, karenadenganbantuansistempengendalianmakahasil yang diinginkandapatterwujud. Sistempengendaliandibutuhkanuntukmemperbaikitanggapansistemdinamik agar didapatsinyalkeluaranseperti yang diinginkan. Sistemkendali yang baikmempunyaitanggapan yang baikterhadapsinyalmasukan yang beragam. Dalamperancangansistemkendaliinidiperlukangambarantanggapansistemdengansinyalmasukandanaksipengontrolan yang meliputi : 1. Tanggapansistemterhadapmasukan yang dapatberupafungsialih, fungsiundak, fungsiimpulsataufungsilainnya. 2. Kestabilansistem yang dirancang 3. Tanggapansistemterhadapberbagaijenisaksipengontrolan.
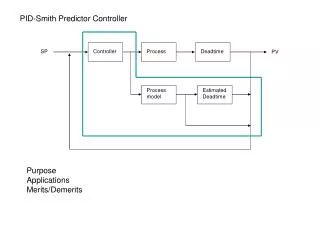
Permasalahanyang dihadapidalamperancangansistemkendaliadalahmendapatkanfungsialihdarisistemtersebut. Setelahfungsialihdidapatkanpermasalahanselanjutnyaadalahmenganalisisnyaapakah system yang dibuatsudahbaikataubelum. SistemPengendali PID GambarDiagram bloksistemkendaliberumpanbalik
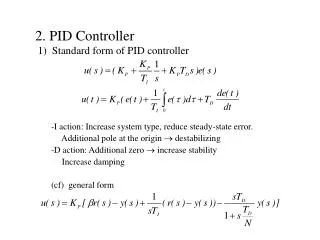
Kendaliyang diaplikasikanpadasistempengendalianputaran motor dc pada project iniadalahkendali PID. Secaraumum , blok diagram pengendali PID yang digunakansepertiberikut: GambarBlok PengendaliPID Fungsi transfer pengendali PID dalam domain s dinyatakandenganpersamaan:
Untukmerancangsistemkendali PID, kebanyakandilakukandenganmetode trial & error. Hal inidisebabkankarena parameter Kp, Kid an Kdtidak independent. Untukmendapatkanaksikendali yang baikdiperlukanlangkahcoba-cobadengankombinasi P, I dan D sampaiditemukannilaiKp, KidanKdseperti yang diinginkan. PID controller memiliki transfer function sbb : Tanggapansistemkendali PID terhadap parameter :