Download
1 / 19
190 likes | 371 Views
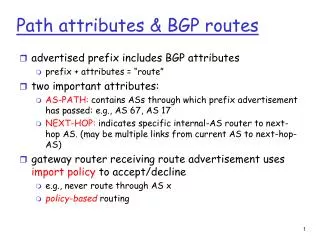
Ioannis Karamouzas, Roland Geraerts, Mark Overmars. Indicative Routes for Path Planning and Crowd Simulation. Path Planning. What is path planning Steer character from A to B Computer games and path planning Fast and flexible Real-time planning for thousands of characters

E N D
Ioannis Karamouzas, Roland Geraerts, Mark Overmars Indicative Routes for Path Planning and Crowd Simulation
Path Planning • What is path planning • Steer character from A to B • Computer games and path planning • Fast and flexible • Real-time planning for thousands of characters • Flexibility to avoid other characters and local hazards • Individuals and groups • Natural Paths • Smooth • Collision-free • Short • Keep a preferred amount of clearance from obstacles • Flexible • …..
Path Planning • Maintain suspense of disbelief • Realistic graphics and physics • Still though, the path choices that characters make are poor
Existing Algorithms Grid-based A* Algorithms Computational expensive Aesthetically unpleasant paths Waypoint graphs Hand designed Do not adapt to changes in the environment Navigation Meshes Automatic construction is slow Paths need to be smoothed
Existing Algorithms Local Methods Flocking [Reynolds, 1987 & 1999], Helbing’s Social Force Model [Helbing et al, 2000] Reactive style planners Local methods fail to find a route Suffer from local minima problems Lead to repeated motion
The Indicative Route Method In real life, people Do not plan an exact path, but A preferred/desired global route A path planning algorithm should produce: An Indicative Route Guides character to its goal A corridor Allows for flexibility
The Indicative Route Method The IRM method in action: A collision-free indicative route determines the character’s preferred route A corridor around this route defines the walkable area for the character A smooth path is generated using a force-field approach
Computing Corridors 3D Environment • The Corridor Map • Introduced by [Geraerts and Overmars, 2007] • Provides a system of collision-free corridors • Corridor: sequence of maximum clearance disks • The Corridor Map is computed as follows: • The Generalized Voronoi Diagram is approximated using GPU [Hoff et al, 1999] • Clearance + additional info is stored Skeleton of the map Corridor
Computing Corridors Computing the Corridor Map Only required during preprocessing Very fast (50 ms, NVIDIA GeForce 8800 GTX) Compute a corridor Retract the indicative route to the Generalized Voronoi Diagram Find corresponding path in diagram Use clearance information as a representation of the corridor
Local Navigation in IRM Boundary force Find closest point on corridor boundary Increases to infinity when close to boundary 0 when clearance is large enough (or when on GVD) Steering force An attraction point moves along the indicative route Attracts the character with a constant steering force Noise force Create variation in paths Perlin noise is used
Local Navigation in IRM Collision Avoidance Force Avoid collision with other characters and moving entities Helbing’s model can be used Additional models can be easily incorporated Obtain the final path Force leads to an acceleration term Integration over time, update velocity/position/attraction point Results in a smooth (C1-continuous) path
IRM method • Resulting vector field • Indicative Route is the medial axis
Creating Indicative Routes Use the Generalized Voronoi Diagram Retract start and goal Find shortest path (using A*) The corridor is obtained immediately Use a network of Indicative Routes Created by level designer Voronoi-Visibility Complex [Wein et al, 2005] A* on coarse grid Additional information can be incorporated For example flow into account Use the notion of Influence Regions
Crowd Simulation • Method can plan paths of a large number of characters • Goal oriented behavior • Each character has its own long term goal • When a character reaches its goal, a new goal is chosen • Wandering behavior • Attraction points do a random walk on the indicative network • Experiments • Goal-oriented behavior • Simulation ran for 1000 steps • Each step calculates 0.1s of simulation time
Crowd Simulation - Experiments City environment 2D footprint (640 ms) Test Environment
Crowd Simulation - Experiments • Performance • 2.4 GHz Intel Core2 Duo, 2 GB memory • One CPU core used • 3000 characters, CPU usage 26%, FPS 33
Current Research Global behavior Incorporating influence regions Types of behavior (shopping, tourists, …) Further improving the local methods Take mood and personality into account Dealing with small groups Observing and modeling paths of real humans Motion capture data Tracking pedestrians Evaluation of the results Project’s Website http://people.cs.uu.nl/ioannis/irm