Download
1 / 22
220 likes | 391 Views
MeteorScan Overview and other Transient Detection Algorithms Pete Gural peter.s.gural@saic.com Meteor Orbit Determination Workshop #3 April 17, 2010. Algorithmic Development Considerations. Imaging Modalities and Purpose All sky – Fireball survey and meteorite recovery

E N D
MeteorScan Overview and other Transient Detection Algorithms Pete Gural peter.s.gural@saic.com Meteor Orbit Determination Workshop #3 April 17, 2010
Algorithmic Development Considerations • Imaging Modalities and Purpose • All sky – Fireball survey and meteorite recovery • Moderate FOV – Meteor flux, mass index, stream characterization • Telescopic – Ablation, orbits, spectroscopy, lunar impacts • Throughput - Real-time, Near-real-time, or Post-collection • Detection - Fast (high SNR) or robust (low SNR) algorithm • False alarms - Tolerance for and mitigation approach • Computing - Processing capacity, storage, interfaces • Analysis - Calibration, Cueing and/or Science exploitation
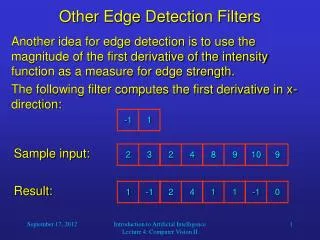
Detection Algorithm Choices • Streak Detection • Matched Filter– Hypothesize motion, shift and stack, then threshold • Best Pd, Pfa but large hypothesis count limits the application to meteors • Hough Transform– Threshold pixels, transform to Hough space, find peaks feed MF • Good Pd, Pfa suitable for near real-time with short latency • Orientation Kernel– Convolve spatial kernel, merge detections via temporal propagation • Good Pd, Pfa suitable for near real-time with short latency • Cluster Tracking– Threshold pixels, locate clusters, motion consistency • Moderate Pd, Pfa suitable for real-time tracking needing rapid response • Spatial Change – Threshold pixels and match to spatial signature • Poor Pd, Pfa useful when the transient leaves no temporal response • Background Removal • Clutter Suppression – Use noise statistics to whiten the imagery • Meanor Median– Good for stationary background, lower noise threshold • Difference Frames – Good for slowly drifting background, fast processing
MeteorScan 3.20 Overview • Primarily for Meteor Detection in Video • Limited analysis capability since users wanted to “roll their own” • Operates at full resolution and near the recorded rate • Used by the North American Professional Meteor Community • Univ. of W. Ontario, NASA/MSFC, SETI • Originally Real-Time on a Mac circa 1997 • Migrated to Non-RT on a PC/Windows system ingesting AVIs • MeteorScan Capabilities • Masking and FOV Calibration • Detection via Hough Transform & MLE • User confirmation review and editing • Radiant association and statistics • Software library for detection-only processing in Windows and Linux
MeteorScan Detection Processing Noise Tracking Filters (in blue) Secondary Hough Space Primary Image Space Tertiary MLE Space <MLE> MLE Detect ? . . Max Likelihood Estimate . Frame Differencing PrimaryThresholding Hough Transform Hough Peaks Track Hypothesis
Streak Detection - Hough TransformMap spatial coordinate exceedance pixels into Hough space PCD • Traditional HT – hypothesis all lines that pass through each point • Pixel Pair HT - two points define line thus one point in Hough space. Localize pairs to reduce ops count. • Phase Coded Disk HT – convolve PCD kernel around each point to obtain orientation y x MeteorScan SPFN - LFI Traditional HT 3 points on a line Line in Traditional HT (butterfly self-noise) Pixel pair HT N2 ops Phase coded disk HT N ops
MTP Detector: Croatian Meteor Network • Video Compression via “SkyPatrol” • CONOPS • Save one RGB bit mapped file for every N seconds of video • For each pixel, keep the max value in time and associated frame# • Extending to temporal mean and std dev (excluding max) for flat fielding • Max Temporal Pixel (MTP) meteor detection software • Uses the MeteorScan detection modules, Post-processing by CMN Maximum Pixel Value Frame Number of Max Reconstructed Video
CAMS at the SETI Institute • All-sky coverage with high angular resolution • CONOPS • 5 DVRs monitors 20 CCD cameras for motion detection at 2 sites • Records all cameras via FTP compression (Flat-field Temporal Pixel) • Download only compressed video snippets containing detections • MeteorScan processed on DVR archive • Post-processing for triangulation and orbits by SETI DVR 4 channels DVR 4 channels Archived Detections via MeteorScan DVR 4 channels DVR 4 channels DVR 4 channels
MeteorScan for Telescopic Meteors • Fragmentation studies, Precise radiant positions • CONOPS / Issues • Very narrow FOV and large optics deep stellar lm without intensifier ! • Meteor trailing losses still limits meteor lm +6.5 • Small FOV lowers # meteors collected • Orion 80mm f/5 finder scope • 2x Focal reducer 2 degree FOV and stellar lm=+10.5 • MeteorScan has option for long streaks Scott Degenhardt’s “Mighty Mini” Orion 50 mm 5 km Short Baseline Meteor Triangulation
Transient Video Detection Applications • LFI Detector for the Spanish Fireball Network • Massive Compact Halo Object Detection • Lunar Meteoroid Impact Flash Detection • Meteor Tracking System • Meteor Simulation for ZHR
LFI Detector: Spanish Meteor Network • Large format CCD: 4K x 4K pixels • All sky coverage with 2.4 arc-minute resolution • Non-video system: stellar lm = +10, meteor lm = +2 • CONOPS • Slow read out CCD 1 snapshot every 90 seconds • Long Frame Integration (LFI) meteor detection • Differenced frames ( stars + and -, meteors + or - ), Hough Transform PCD • Post processing orbital reductions analysis by SPFN - = HT
Massive Compact Halo Object Detection • Jupiter sized objects wandering the galaxy • Stars briefly wink out from occultation • Find TNOs in the plane of the solar system • CONOPS • Collect pairs of dense star field video • Search for short timescale occultation • Use pair coincidence to rule out scintillation • 2 Telescopes with frame rate CCDs • Observation of an open cluster with good timing • MachoScan to identify occulted stars • Space-time coincidence of recorded AVIs • Post processing analysis by Mount Allison University Few meters
LunarScan: Lunar Impact Flash Detection • Boulder Sized Meteoroids Smashing into the Moon ! • Hypervelocity impact creates a momentary flash • Duration typically a few tens of milliseconds • One lasted ½ second ! • CONOPS • Monitor the dark face of the Moon • 3 days around first and last quarter • Minimum of two sites >20 km separation • LunarScan software to locate flashes • Register, Track mean and standard deviation • Threshold, Spatial cluster • Post-collection analysis by NASA/MSFC Camera Field of View
AIMIT Meteor Tracking System • Increase #s of meteors observed in narrow FOV instruments • Enables spectroscopy and high resolution triangulation/orbits • CONOPS • Wide field camera cues steering system for narrow field instrument • MeteorCue Detection Algorithm • Threshold, Fast clustering, Centroid, Track, Mirror Commands • Response time <100 msec (Galvo), <500 msec (Stepper) • Post-processing Univ of W. Ontario
MeteorSim Processing Radiant Particles assumed to have: Initial direction along radiant vector Random start position in cylinder Fixed begin and end heights Fixed magnitude Initial speed V∞ Fixed population index r Mag distribution = [-12,+6.5] Undergone zenith attraction Not decelerated Distance fading loss Atmospheric extinction loss . . . . . . . . . . . . . . . Specific to CCD vs. Human: Limiting magnitude FOV geometry FOV look direction Resolution Integration time Angular velocity loss Off-axis perception Earth Monte Carlo meteor influx simulation for video and visual observations/calibration Converts video counts Spatial flux ZHR
Algorithmic Backup Charts • MeteorCue • LunarScan • Streak Detection • Matched Filter • Orientation Kernel • Fast Clustering
MeteorCue Processing Mean, Threshold, & SNR Tracking Filters (Updated on a few rows per frame) <X> Full Frame Imagery 30 fps <X> + k1s <SNR> + k2sSNR Even Field Row, Col, SNR 2 x 16-bit Digital Signals Vx, Vy Alpha-Beta Tracker 30 Hz Odd Field Row, Col, SNR Repeat every 33 msec Tracker Association Update Fast Centroid Mirror Commands Threshold Each Frame Cluster Detection
LunarScan Processing Image Courtesy NASA/MSFC Sept 16, 2006 Optional register (PCM translation), Warp mean and s to current image Threshold Mean and standard deviation Triplet + Doublet cluster detector Update Exceedances
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . Streak Detection – Matched FilterUses a “Track-before-Detect” approach • Remove Mean and Estimate 2nd Order Noise Statistics • Apply Covariance Inverse to Remove Clutter (Whitening) • Hypothesize Multiple Target Velocity Speeds and Directions • Shift Frames and Add for each hypothesis • Convolve with Smear Kernel Mean Removal Covariance Estimate Clutter Removal 1 Velocity Hypothesis Shift & Stack Threshold Detect Decluster / Culling . 2 . . . . . . 3 Multi-Frame Integration
Streak Detection – Orientation KernelSmall scale spatial-only convolution • Convolve 8 orientation kernels across focal plane • Detections are tested for temporal propagation • Shown are 5x5 binary kernels (MetRec) • Can be higher fidelity with width and fractional fill • Can use larger dimensions more kernels • Can be formulated as a spatial matched filter
Streak Detection – Pixel ClusteringFind Groups of Pixels (Limited Spatial Extent, Track in Time) 1 0 1 1 Threshold Crossers Define Cell Size from Max Meteor Motion Per Frame Scale = 16 pixels / deg Max = 51 deg / sec 30 frames / sec Max 28 pixels / frame Cell = 32x32 pixels 3 1 3 0 1 S 1 2 1 0 1 2 5 1 1 0 Row Indices 1 4 8 1 3 Column Indices 1 2 1 1 1 Remove Singletons - Fill 32x32 Cells with Threshold Crossers Find Highest Peak Counts in 2 x 2 Cell Sums