Advancements in Solar Stereoscopy: Current Practices and Future Needs
430 likes | 524 Views
Explore the current state of stereoscopy in solar physics, including 3D geometry of solar features from EUV images, loop tracing methods, field line projections, and reconstruction errors. Discover future developments needed for progress in the field.

Advancements in Solar Stereoscopy: Current Practices and Future Needs
E N D
Presentation Transcript
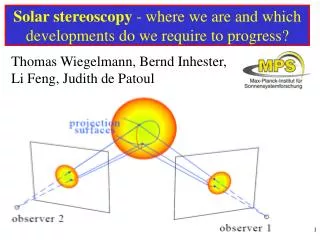
Solar stereoscopy - where we are and which developments do we require to progress? Thomas Wiegelmann, Bernd Inhester, Li Feng, Judith de Patoul
How? What do we have and what we want? 3D geometry/physics of e.g. coronal loops and polar plumes EUV-images from 2 viewpoints 1. Extract curve-like objects 2. Associateobjects in bothimages 3. GeometricStereoscopy 4. Estimatereconstruction error in 3D 5. Derive physical quantities
1. Extract curve-like objects Processed image: A 7x7 boxcar smoothed image was subtracted from original Original Trace-image (from Aschwanden,Sol. Phys. 2008)
Extract curve-like objectsa) Manual loop tracing Can we teach the computer to trace loops automatically? Trace-image, central part (Aschwanden, 2008) 210 manually traced loops.
1. Extract curve-like objectsb) Automatic loop tracing Ridge detection Definition of a ridge Image intensity I (x, y) satisfies: Inhester et al, Sol. Phys. 2008
Merging and cleaning Done by hand until now
solar rotation: two viewpoints 2. Associate objects in both images Correspondence problem:Which two loops in the two images are the projections of the same loop in the real 3D case? Two-view TRACE images mimicking the EUVI image pair (Feng et al., Sol. Phys. 2007)
Magnetic field and EUV-images Plasma outlines magnetic field lines Can we use coronal magnetic field models as a proxy for 3D plasma loops?
Single viewpoint: SOHO/EIT, TRACEUse B-Field for feature-recognition(Wiegelmann et al., Sol. Phys. 2005) • Extrapolate coronal magnetic field from photosphere. • Project 3D field lines onto an EUV-image. • Emissivity and gradient along projected field lines. • Alternative-1:Compare field lines and plasma.How well are they aligned? • Alternative-2: Extract 1-D loops out of the EUV-images and compare with projections of magnetic field lines thereafter.
Linear force-free field with α=-0.01 [Mm-1] 3D-magnetic field lines, linear force-free α=-0.01 [Mm-1]. Used in Marsch et. al. 2005 tostudy plasma flows with Sumer. Alternative-1: Compare projected field lines direct with EUV-image
Alternative-2: Compare projected field lines with extracted EUV-loops Loops extracted from EUVI-image with automatic feature recognition tool. Dotted lines:Projection of best-fit linear force-free field lines.
Can we extend this method to solve the correspondence problem of STEREO-images? • A 3D magnetic field lines is unique. • Project field lines onto EUVI-images[or loops extracted from EUVI]. • Measure distance of loops and projectedmagnetic field lines in both images. • Loops close to the same field line inboth images are very likely associated.
3. GeometricStereoscopy • Epipolar geometry reduces 3D-reconstructionproblem to several 2D problems. • Coordinate system is defined by spacecraft locations and rotation axis of the Sun. From Inhester, ISSI 2006
Epipolar geometry provides necessary criteriumfor loop association: Related loops in bothimages must intersect with same epipolar lines. • Epipolar range often not easy to specify,because ends of loops can be very faint=> Parts of loops not visible in one orboth images. From Inhester, ISSI 2006
Reconstruction ambiguity 3. GeometricStereoscopy Reconstruction of east-west orientation loops has two solutions, which one is correct? Two-viewpoint images are not sufficient
4. Estimatereconstruction error in 3D curve segment in-clined to epipolar line • Features tangential to epipolar lines have highestreconstruction error. • For east-west coronal loops this means that largest reconstruction errors occur at the loop top. From Inhester, ISSI 2006 curve segment par-rallel to epipolar line
4. Estimatereconstruction error in 3D From Inhester, ISSI 2006 • 3D reconstruction error depends on the resolution w of EUVI-images and on the angle between projection planes. • Projection angle is smaller or equal as angle between STEREO-A or B. • For loop segments in the epipolarplane the projection angle is zeroand the error infinite.
4. Estimatereconstruction error in 3D 2. Associateobjects in bothimages • Small separation angle between spacecraft:Association problem easy to solve,Large 3D reconstruction error. • Large separation angle:Association problem difficult to solve,Small 3D reconstruction error.
Magnetic stereoscopy Artificial STEREO-images from a model Active Region. (Wiegelmann & Inhester, Solar Phys. 2006)
Original exact solution • Pure geometric stereoscopic 3D-reconstruction. The reconstructed 3D loops have ambiguities.
Magnetic modeling with different models (c) potential, d) linear force-free, e) nonlinear force-free). Yellow dotted lines show the original exact loops. We used (artificial) EUV-images from two different viewpoints to constrain the magnetic loops.
Geometric stereoscopy. We removed ambiguities (multiple solutions) in the stereoscopic reconstruction by choosing the solution which is closest to a given magnetic field model. (Here we used the worst model, a potential field, which was,however, sufficient to remove the ambiguities.)
Magnetic stereoscopy Wiegelmann&Inhester 2006
Compare real + artificial images, Loops + B-lines Modeling,Tomography 5. Derive physical quantities • Rigorous Test of B-field models. • Obtain free model parameters. • Test scaling laws. • Get plasma parameters along loops- Temperature- Density- Pressure
Example-1: Active Region loops, Feng et al., ApJL 2007 NOAA 10960 EUVI_B EUVI_A
1. Extract curve-like objects EUVI_B EUVI_A Loops identified from unsharp mask filtered images.
2. Associateobjects in bothimages Loop correspondence Linear force-free extrapolation 3D magnetic field lines : a guide to the loop correspondence MDI : 2007-06-08T03:12:00 UT
Loop correspondence 2. Associateobjects in bothimages correspondence in the northern active region
3. GeometricStereoscopy Loop reconstruction Yellow: reconstructed 3D loops Red: best fit magnetic field lines Northeast of AR view from STEREO_A
4. Estimatereconstruction error in 3D Yellow: Reconstructed loop with error bars.Red: Best fit linear force-free field line.
5. Derive physical quantities Loop parameters 1. The linear force-free assumption is often not adequate. 2. Most of the loops cannot be approximated by planarcurve segments . 3. Most of the loops are not circular.
Example-2: Polar Plumes (Feng et al., ApJ, submitted) 1. Extract curve-like objects.Here: straight lines,intensity maximum. 4 EUVI_A 0 1 2 3 2. Associateobjects in both images.Easy for smallseparation angle. EUVI_B 4 0 1 2 3
solar limb as seen from STEREO A Side View 3. GeometricStereoscopy 4. Estimatereconstruction error in 3D dotted lines: 3D reconstruction results solid lines: extrapolations back to the solar surface. Small separation angle: Correspondenceproblem easy to solve, no reconstruction ambiguity. But: Large 3D reconstruction error.
Project 3D plumes onSUMER observations 5. Derive quantities Density, Temperature, Plasma flow (1)Doppler Shift map: No obvious outflows detected in plume regions. (2) Ne measured from density sensitive Si VIII line ratio (3) Te measured from Mg IXtemperaturesensitive line pair.
Polar Plumes, Feng et al. 2009 5. Derive quantities Density, Temperature, Plasma flow • Outflow velocity along plumes is to small to make it a dominant contributor to the fast solar wind. • 3D plumes are more horizontal than a dipole field. • Plumes are in hydrostatic equilibrium. • Temperature derived from the density scale height is higher than electron temperature.
Stereoscopy vs. coronal field extrapolation Hinode FOV From DeRosa et al. 2009: Blue lines are stereoscopic reconstructed loops (Aschwanden et al 2008), Red lines nonlinear force-free extrapolated field lines from Hinode/SOT.
Stereoscopy vs. coronal field extrapolation • Vector magnetogram data(Hinode/SOT) areessential for nonlinear force-free field modeling. • Unfortunately Hinode-FOV covered only a smallfraction (about 10%) of area spanned by loopsreconstructed from STEREO-SECCHI images. • Quantitative comparison was unsatisfactory. • Plan: Compare magnetic field extrapolationsfrom SDO/HMI and stereoscopy with STEREO/SECCHI and SDO/AIA. • Can we combine extrapolations from photosphericmeasurements with stereoscopy?
3D field lines 3D EUV loops Scaling laws Stereoscopy Tomography Plasma along magnetic loops Artificial images 3D Force-free magnetic field LOS-integration Self-consistent equilibrium Where to go in stereoscopy?Where to go in corona modeling? SDO/HMI magnetogram STEREO images Force-free code consistent? compare MHS code